Konfigurations-Beispiel
PDO Mapping
Die Prozessdaten auf der EtherCAT-Seite werden über das PDO Mapping beschrieben. Die einzelnen EtherCAT-Geräte bringen über die ESI-Datei (EtherCAT-Beschreibungsdatei) ein vordefiniertes PDO Mapping mit, also eine sinnvolle Kombination einzelner PDOs.
Diese Kombinationen wiederum werden auf Profinet-Seite anhand unterschiedlicher Submodule, und somit Prozessdaten, beschrieben. D.h. jedes vordefinierte PDO Mapping hat ein zugehöriges Submodul.
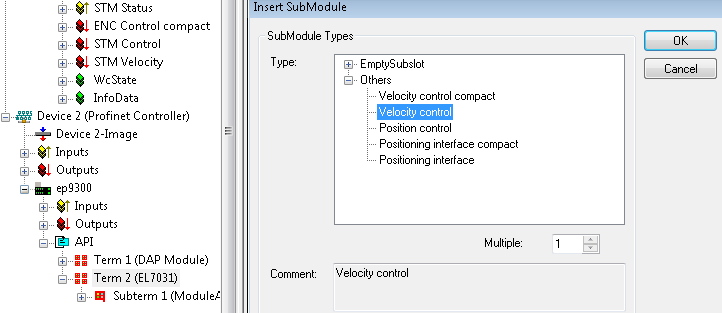
Solche modulare Klemmen haben an EP9300-0022 immer auf Subslot 1 ein festes Submodul stecken. Dieses ist der Platzhalter für die Klemme selbst, d.h. hierüber wird z. B. für die Klemme die allgemein gültige Diagnose betrieben. Auf Subslot 2 werden die eigentlichen Prozessdaten gesteckt und anhand dieser wird das PDO Mapping am EtherCAT-Master erzeugt.
SDO Mapping
Jeder der gesteckten Subslots kann Parametrierdaten mit sich bringen. Über diese Daten werden die Service-Daten-Objekte (SDOs) übertragen, d.h. die SDOs werden auf Recorddatensätze abgebildet. Es werden immer die Objekte 0x8xxx und 0xF8xx abgebildet. Da die Indizes auf der Profinet-Seite nur von 0 - 0x7FFF herstellerspezifisch sind, entsprechen die EtherCAT-Objekte 0x8xxx den Profinet Record Indizes 0x3xxx, EC-Objekte 0xF8xx dem Profinet Indexbereich 0x48xx. In Profinet werden die Records immer in der Startup-Phase vom Controller geschrieben, diese werden intern dem EtherCAT-Master als Startup SDOs übergeben. D.h. während eines Profinet-Neustarts wird auch der interne EtherCAT-Master neu gestartet.
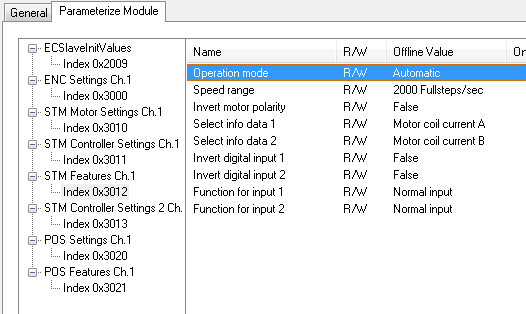
Diese Datensätze können auch im laufenden Betrieb gelesen und geschrieben werden.
Inbetriebnahme EL7031
Die Defaulteinstellungen sind für eine Erstinbetriebnahme ausreichend, d.h. es muss nur das entsprechende Submodul ausgewählt werden. Anhand dessen werden die PDOs und SDOs der Klemme parametriert. Wird z. B. das "Velocity Control" Submodul gewählt, muss nur das Bit Control_Enable gesetzt werden, anschließend durch Vorgabe einer Sollgeschwindigkeit den Motor drehen.