Grundlagen Inkremental Encoder
Kanal A und B werden die um 90° phasenverschobenen digitalen Ausgangssignale eines Inkremental-Encoders erfasst. Diese Signale werden mit Hilfe des Quadraturdecoders und des 32 Bit Zählers in einen Positionswert mit vierfach - Auswertung gewandelt. Die Latch- und Reset- Funktionalitäten ermöglichen ein exaktes und geschwindigkeitsunabhängiges Referenzieren und Speichern des Zählerstandes.
Inkremental-Encoder teilen eine 360° - Drehung der Encoder‑Achse in einzelne Schritte (Inkremente) auf.
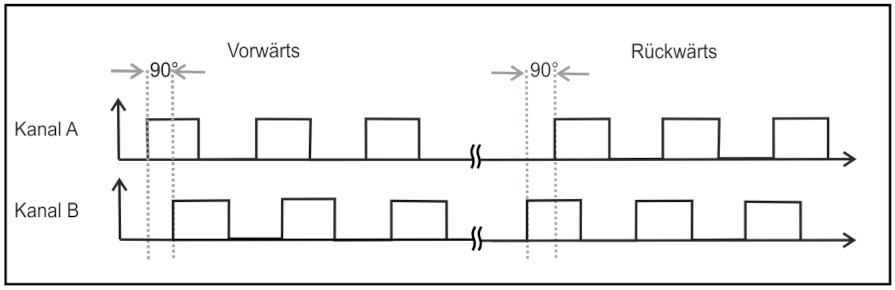
Die Phasenlage zwischen den Signalen an Kanal A und Kanal B gibt die Zählrichtung vor.
Vorwärts: Signal an Kanal A ist 90° voreilend gegenüber Kanal B
Rückwärts: Signal an Kanal A ist 90° nacheilend gegenüber Kanal B.
Bei einfach - Auswertung werden die steigenden Flanken an Kanal A gezählt.
Bei vierfach - Auswertung werden die steigenden und fallenden Flanken an Kanal A und Kanal B gezählt.
Während Absolutwert‑Encoder direkt nach dem Einschalten einen absoluten und über den kompletten Verfahrweg eindeutigen Positionswert liefern, muss bei Inkremental-Encodern nach dem Einschalten eine Referenzfahrt (engl.: Homing) (TwinCAT 2: TX1270 | TwinCAT CNC, TwinCAT 3: TF5200 | TwinCAT 3 CNC - Referenzpunktfahrt) durchgeführt werden, um eine eindeutige Position ermitteln zu können.
Das Referenzieren kann z. B. mit Hilfe von Referenznocken oder über den Nullimpuls des Gebers vorgenommen werden.