Touch Probe
(Master TwinCAT 2.11 R3)
Funktionsbeschreibung
Die Funktion Touch Probe speichert die aktuelle Position des Motors, wenn eine Signalflanke an einem digitalen Eingang erkannt wird.
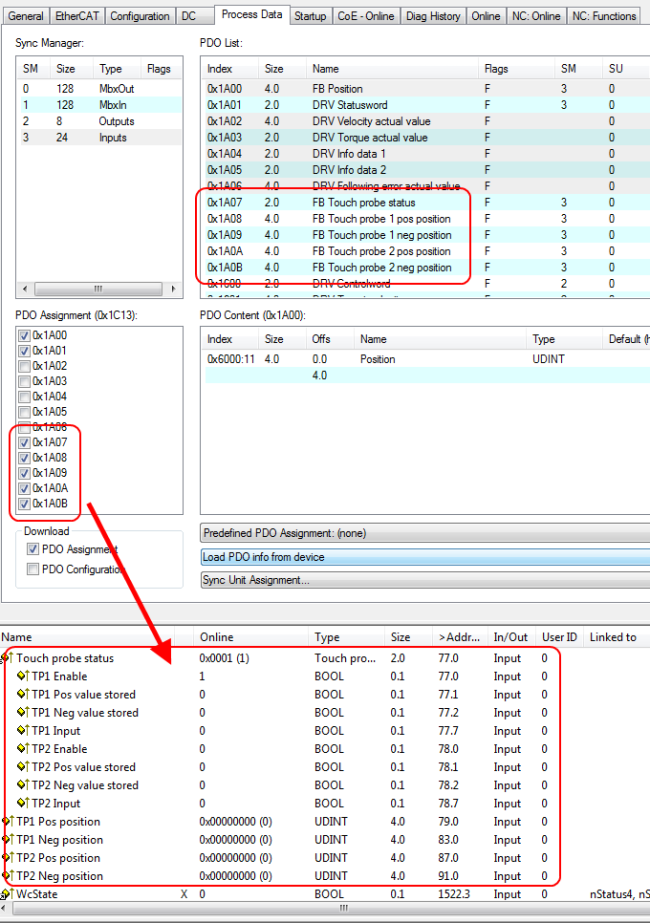
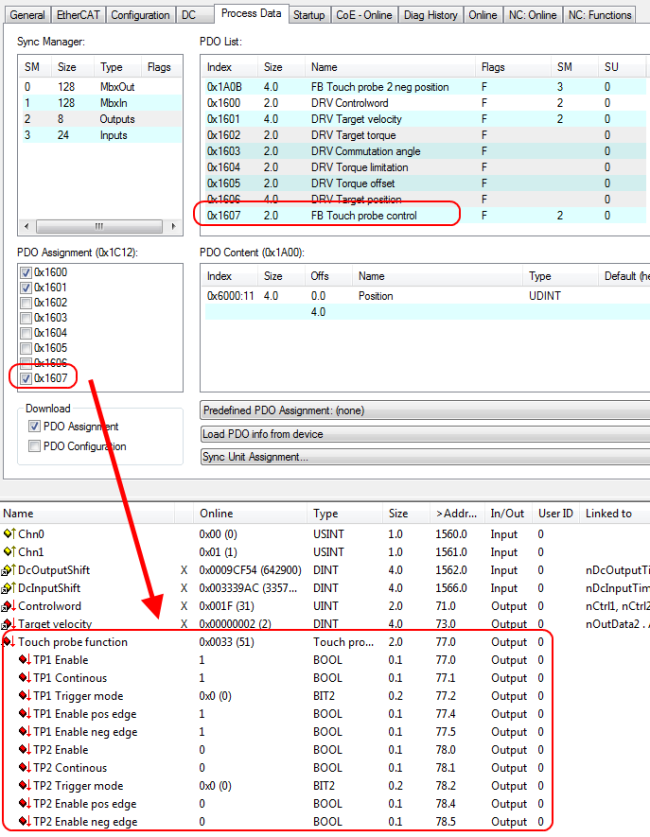
Im Reiter Prozessdaten können die dazu nötigen Prozessdatenobjekte aktiviert werden (siehe Abb. Touch Probe inputs und Abb. Touch Probe outputs).
Step-by-step
Zur Funktionsbeschreibung wird hier beispielhaft TP1 verwendet.
- Um die Touch Probe Funktion generell zu aktivieren, muss TP1 Enable auf true gesetzt werden.
- Anschließend muss entschieden werden, ob bei einer positiven Flanke auf dem Eingang 1 die Position gespeichert werden soll (TP1 Enable pos edge = true), bei einer negativen Flanke (TP1 Enable neg edge = true) oder in beiden Fällen (beide auf "true" setzen).
- Mit TP1 Continous wird entschieden, ob nur beim ersten Event die Position gespeichert werden soll (TP1 Continous = false) oder ob das bei jedem Event geschehen soll (TP1 Continous = true).
Sind beispielsweise TP1 Continous und TP1 Enablepos edge gesetzt, wird bei jeder steigenden Flanke am Eingang 1 der Box die Position gespeichert.
Ist TP1 Enable neg edge gesetzt und TP1 Continous nicht, wird nur bei der ersten negativen Flanke am Eingang 1 der Box die Position gespeichert. Möchte man diesen Vorgang wiederholen, muss zunächst der TP1 Enable wieder deaktiviert und anschließend wieder aktiviert werden. Dann wird erneut bei der ersten negativen Flanke die Position gespeichert. - Der TP1 Trigger mode hat bei EP7211 keine Funktion.
- Die gespeicherte Position der positiven Flanke kann in den Inputs der Prozessdaten unter TP1 Pos position, die der negativen Flanke kann unter TP1 Neg position ausgelesen werden.
- Die Variablen unter Touch probe status dienen der Diagnose.
- Die Touch Probe Eingänge müssen mit einem 1-Leiter +24 V Signal angesprochen werden.