CST
In der Betriebsart CST arbeitet EP7211 im zyklischen Drehmomentsinterface. Über die Variable Target torque kann ein definiertes Drehmoment eingestellt werden.
Step-by-Step
- Fügen Sie die Box, wie im Kapitel Konfiguration in TwinCAT beschrieben, zur Konfiguration hinzu.
- Verknüpfen Sie die Box, wie im Kapitel Einbindung in die NC-Konfiguration beschrieben, mit der NC.
- Importieren Sie die Motor XML Datei, wie im Kapitel Einstellungen im CoE beschrieben, in das Start-up Verzeichnis.
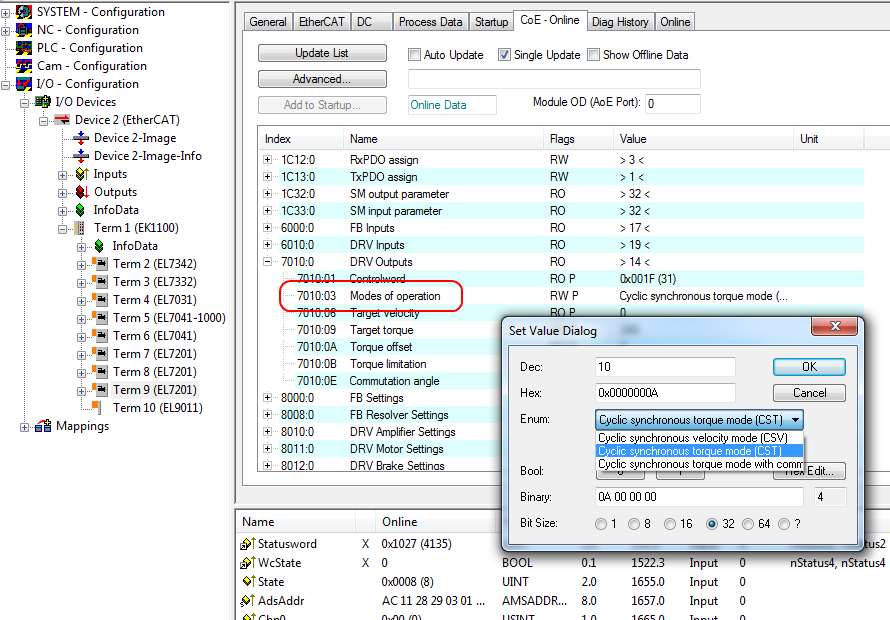
- Stellen Sie die Betriebsart im CoE-Verzeichnis auf Cyclic synchronous torque mode (CST), Abb. Auswahl Betriebsart
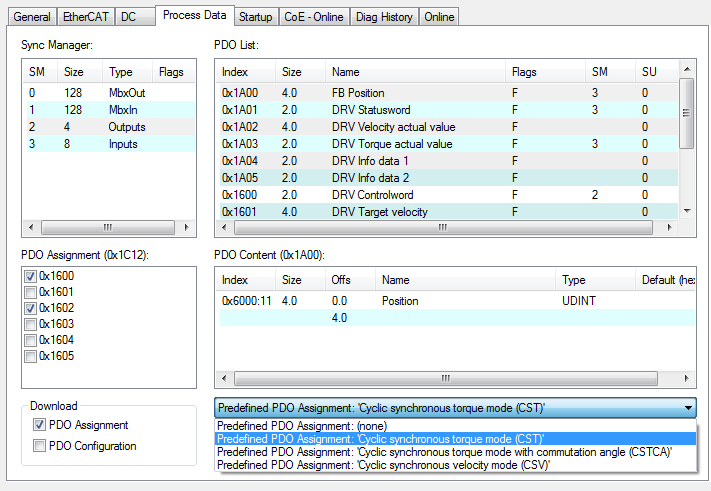
- Wählen Sie bei den Predefined PDO Assignments ebenfalls Cyclic synchronous torque mode (CST), Abb. Predefined PDO Assignment wählen
- Aktivieren Sie die Konfiguration (Ctrl+Shift+F4)
- Durchlaufen Sie die State Machine der Box. Dazu gibt es zwei Möglichkeiten:
- Sie nutzen die TwinCAT NC.
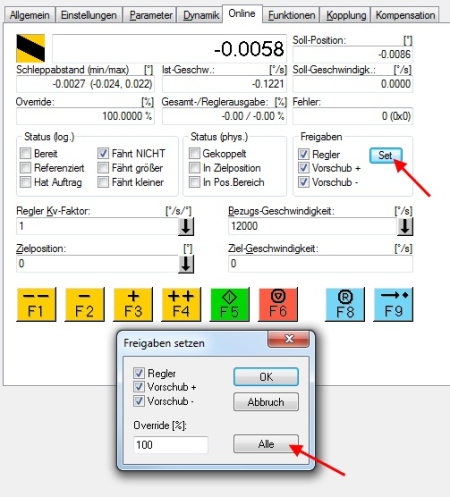
Die State Machine wird von der NC automatisch durchlaufen. Sie können in der Registerkarte Online der Achse die Achse freigeben.
Setzen Sie alle Häkchen und stellen Sie Override auf 100% (siehe Abb. Freigaben setzen). Anschließend kann die Achse bewegt werden. - Sie nutzen nicht die TwinCAT NC.
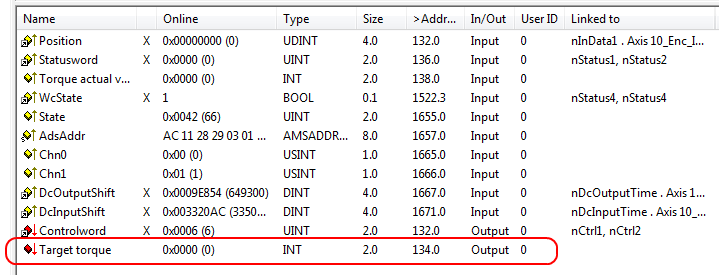
In diesem Fall müssen Sie die State Machine manuell durchfahren. Befolgen Sie dazu die Anweisungen im Kapitel Inbetriebnahme ohne die NC. - Über die zyklische Variable Target torque (Abb. Vorgabe Drehmoment) können Sie ein definiertes Moment vorgeben.