Schrittmotor
Der Schrittmotor ist ein Elektromotor, vergleichbar dem Synchronmotor. Der Rotor ist als Permanentmagnet ausgeführt, während der Stator aus einem Spulenpaket besteht. Die Frequenz des Statordrehfeldes steht immer in einem festen Verhältnis zur Drehzahl des Rotors. Im Unterschied zum Synchronmotor verfügt der Schrittmotor über eine große Zahl von Polpaaren. Bei einfachster Ansteuerung schaltet man den Schrittmotor von Pol zu Pol, bzw. von Schritt zu Schritt.
Schrittmotoren sind schon seit vielen Jahren im Einsatz. Sie zeichnen sich durch Robustheit aus, lassen sich leicht ansteuern und liefern ein hohes Drehmoment. Die Möglichkeit die Schritte mit zu zählen erspart in vielen Anwendungsfällen ein kostenintensives Rückführungssystem. Auch nach der zunehmenden Verbreitung der Synchron-Servomotoren ist der Schrittmotor keineswegs „in die Jahre gekommen“, sondern gilt als ausgereift und wird nach wie vor weiter entwickelt, um Kosten und Baugröße zu reduzieren und um Drehmoment und Zuverlässigkeit zu steigern. Bei einem Standard-Schrittmotor mit 200 Vollschritten beträgt die bestmögliche Positioniergenauigkeit ca. 1,8°.
Heute werden in der Industrie überwiegend Hybridschrittmotoren verwendet. Der Rotor besteht bei diesem Motortyp aus einem gezahnten Eisenkern mit einem oder wenigen Permanentmagneten im Kern des Rotors. Der Rotor ist dabei so konstruiert, dass die Polung der aufeinander folgenden Zähne jeweils invers ist. So lassen sich Motoren mit einer hohen Schrittzahl, welche ausschlaggebend für die Positioniergenauigkeit ist, kombiniert mit einem vergleichsweise hohen Drehmoment herstellen. Das elektrische Verhalten eines solchen Hybridschrittmotors ist näherungsweise vergleichbar mit dem eines hochpoligen Synchronservomotors. Durch die synchrone Zahnung von Stator und Rotor ergibt sich jedoch beim Hybridschrittmotor ein wesentlich höheres Rastmoment.
Auf dem Markt werden Hybridschrittmotoren mit zwei oder mehr Phasen angeboten. Da EP7047-1032 für zweiphasige Motoren ausgelegt ist, wird jedoch hier nur auf den zweiphasigen Typ eingegangen, dessen Phasen in dieser Dokumentation mit A und B bezeichnet werden.
Parameter eines Schrittmotors
• Mechanisches System
Unabhängig vom Antrieb und dem Schrittmotor selbst hat der Aufbau der an der Motorwelle befestigten Mechanik einen wesentlichen Einfluss auf die erreichbare Regelgüte.
Eigenresonanz, Lastresonanzen, Getriebespiel (Lose) und Haftreibung beeinträchtigen die Regelbarkeit des Antriebssystems negativ. Dies erfordert oft eine etwas weichere Reglerparametrierung, die wiederum zu einer Erhöhung des Schleppabstands im System führt. Gleitreibung bewirkt wegen des erhöhten Energiebedarfs einerseits eine Verschlechterung des Wirkungsgrades, kann jedoch die Stabilität der Regelung wegen ihrer dämpfenden Wirkung auch positiv beeinflussen.
Prinzipiell gilt, je steifer die Mechanik eines Antriebssystems konstruiert ist, umso einfacher lässt es sich regeln, was das Erreichen eines kleinen Schleppabstands im Antriebsystem begünstigt.
• Drehzahl
Die maximale Drehzahl eines Schrittmotors ist gering und wird meist als maximale Schrittfrequenz angegeben.
• Phasenzahl
Üblich sind 2- bis 5-Phasen-Motoren. EP7047-1032 unterstützt 2-Phasen-Motoren. 4-Phasen-Motoren sind im Grunde 2-Phasen-Motoren mit getrennt herausgeführten Wicklungsenden und können direkt an EP7047-1032 angeschlossen werden.
• Drehmoment
Bezeichnet das maximale Drehmoment des Motors bei unterschiedlichen Drehzahlen. Meist wird eine Kennlinie zur Darstellung verwendet. Das Drehmoment eines Schrittmotors ist im unteren Drehzahlbereich vergleichsweise hoch und ermöglicht in vielen Anwendungsfällen einen direkten Einsatz ohne weiteres Getriebe. Ein Schrittmotor liefert, im Vergleich zu anderen Motoren, ohne großen Aufwand ein Haltemoment, das in der Größenordnung des Drehmoments liegt.
• Rastmoment
Das bei Schrittmotoren konstruktionsbedingt oft stark ausgeprägte Rastmoment kann in einem motor- und lastabhängen Drehzahlbereich zu einer verhältnismäßig starken Eigenresonanz führen. Eine erhöhte Massenträgheit führt in Bezug auf das Rastmoment oft zu einer weniger stark ausgeprägten Resonanz und einer höheren Laufruhe.
• Massenträgheitsmoment
Im Standard Betrieb ist der wesentliche Parameter des mechanischen Systems das Massenträgheitsmoment JΣ. Es setzt sich im Wesentlichen aus dem Massenträgheitsmoment des Schrittmotorrotors JM und dem Massenträgheitsmoment der angeschlossenen Last JL zusammen. Reibmomente JReib und das Trägheitsmoment eines Encoders JEnc werden in erster Näherung vernachlässigt.
JƩ ≈ JM + JL
Das Verhältnis zwischen Lastmoment und Motormoment wird über die Konstante kJ angegeben.
kJ ≈ JL / JM
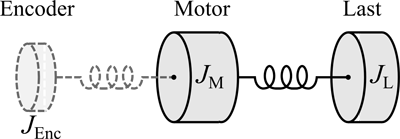
Die Kopplung der einzelnen Massen über die Rotorwelle kann in erster Näherung als Zweimassenschwinger modelliert werden. Die Resonanzfrequenz zwischen Motor und Encoder liegt dabei in einem relativ hohen Frequenzbereich, der bei Schrittmotorantrieben in der Regel nicht relevant ist und wird antriebsintern durch Tiefpassfilterung unterdrückt. Die Resonanzfrequenz zwischen Motor und Last liegt häufig im Bereich zwischen 20 und 500 Hz. Sie liegt damit oft im Betriebsbereich der Antriebsregelung. Eine Reduzierung des Einflusses der Lastresonanz kann konstruktionstechnisch über ein kleines Lastverhältnis kJ und eine möglichst steife Kopplung der Motorwelle zur angeschlossenen Last erreicht werden.
• Resonanzen
In bestimmten Drehzahlbereichen zeigen Schrittmotoren einen mehr oder weniger rauen, unrunden Lauf. Dieses Phänomen ist besonders ausgeprägt, wenn der Motor ohne angekoppelte Last läuft; unter Umständen kann er dabei sogar stehen bleiben (im Standard Betrieb). Die Ursache ist in Resonanzen zu sehen. Grob kann man unterscheiden zwischen
- Resonanzen im unteren Frequenzbereich bis ca. 250 Hz und
- Resonanzen im mittleren bis oberen Frequenzbereich.
Die Resonanzen im mittleren bis oberen Frequenzbereich resultieren im Wesentlichen aus den elektrischen Kenngrößen wie Induktivität der Motorwicklung und Zuleitungskapazitäten. Sie sind über eine hohe Taktung der Regelung relativ einfach in den Griff zu bekommen.
Die Resonanzen im unteren Bereich resultieren im Wesentlichen aus den mechanischen Kenngrößen des Motors. Sie bewirken im Allgemeinen außer dem rauen Lauf, teilweise einen recht erheblichen Drehmomentverlust, bis hin zum Schrittverlust des Motors und sind also in der Anwendung besonders störend.
Der Schrittmotor stellt im Grunde ein schwingungsfähiges System dar, vergleichbar mit einem Masse-Federsystem, bestehend aus dem sich bewegenden Rotor mit Trägheitsmoment und einem magnetischen Feld, das eine Rückstellkraft auf den Rotor erzeugt. Beim Auslenken und Loslassen des Rotors wird eine gedämpfte Schwingung erzeugt. Entspricht die Ansteuerfrequenz der Resonanzfrequenz, wird die Schwingung verstärkt, so dass der Rotor im ungünstigsten Fall den Schritten nicht mehr folgt und zwischen zwei Rastungen hin und her schwingt.
EP7047-1032 verhindert diesen Effekt durch die Feldorientierte Regelung (Extended Operation Modes) bei allen Beckhoff Schrittmotoren.
• Drehmomentkonstante
In den Extended Operation Modes kommt als Parameter der mechanischen Regelstrecke die Drehmomentkonstante kT hinzu, die das Verhältnis zwischen dem drehmomentbildenden Motorstrom und des an der Welle wirksamen Drehmoments angibt. Da der Betrieb im feldorientierten Modus bei Schrittmotoren nicht üblich ist, ist die Drehmomentkonstante jedoch meist nicht im Motordatenblatt zu finden.
Elektrisches System
• Nennspannung, Versorgungsspannung und Wicklungswiderstand
Im stationären Zustand fließt der Nennstrom bei Nennspannung, in Abhängigkeit zum Wicklungswiderstand. Diese Spannung sollte nicht mit der Versorgungsspannung der Leistungsendstufe verwechselt werden. EP7047-1032 gibt einen geregelten Strom auf die Motorwicklung. Unterschreitet die Versorgungsspannung die Nennspannung, kann die Leistungsendstufe den Strom nicht mehr in voller Höhe einprägen und ein Drehmomentverlust ist die Folge. Erstrebenswert sind ein kleiner Wicklungswiderstand und eine hohe Versorgungsspannung, um die Erwärmung gering zu halten und ein möglichst hohes Drehmoment bei hohen Drehzahlen zu erreichen.
• Induzierte Gegenspannung
Hybridschrittmotoren induzieren, wie Servomotoren auch, eine drehzahlproportionale Spannung ui [Vs/rad] in die Statorwicklung des Motors. Diese wird häufig auch als Back Electromotive Force (BEMF) bezeichnet. Die induzierte Gegenspannung bestimmt in Verbindung mit der Zwischenkreisspannung (Motorspannung) die physikalisch erreichbare Maximaldrehzahl des Motors.
Das Verhältnis des Betrages der induzierten Gegenspannung zur Motordrehzahl ist konstruktionsbedingt variabel und wird über die Spannungskonstante ke beschrieben.
ui = ke·ωm
Der Motorparameter ke [mV/(rad/s)] wird für die Schrittverlusterkennung ohne Encoder benötigt.
Bei Schrittmotoren bei denen die Spannungskonstante nicht im Datenblatt angegeben ist, kann sie relativ einfach mit Hilfe eines Digitalmultimeters ermittelt werden. Dazu muss der zu vermessende Motor (innerhalb des Nenndrehzahlbereichs) durch einen Hilfsmotor über eine Kupplung mit konstanter Drehzahl betrieben werden. Die Motorphasen des zu vermessenden Motors müssen dazu offen sein (Nicht angeschlossen oder kurzgeschlossen). Mit dem Multimeter kann der Effektivwert der induzierten Gegenspannung dann an einer der beiden offenen Motorphasen (A oder B) ermittelt werden und damit die Spannungskonstante bestimmt werden.
• Schrittwinkel
Der Schrittwinkel gibt den bei einem Schritt zurückgelegten Winkel an. Typische Werte sind 3,6°, 1,8° und 0,9°. Das entspricht 100, 200 und 400 Schritten pro Motorumdrehung. Dieser Wert ist, zusammen mit der nachgeschalteten Übersetzung, ein Maß für die Positioniergenauigkeit. Aus technischen Gründen lässt sich der Schrittwinkel nicht beliebig reduzieren. Die Positioniergenauigkeit kann nur mechanisch durch die Übersetzung gesteigert werden. Eine elegante Lösung zur Erhöhung der Positioniergenauigkeit ist das Microstepping. Es erlaubt bis zu 64 Zwischenschritte. Der geringere, „künstliche“ Schrittwinkel hat einen weiteren positiven Effekt: Bei gleicher Genauigkeit kann der Antrieb mit einer höheren Geschwindigkeit gefahren werden. Die maximale Drehzahl bleibt erhalten, obwohl der Antrieb an der Grenze der mechanischen Auflösung positioniert.
• Wicklungswiderstand, Wicklungsinduktivität
Wicklungsinduktivität und Wicklungswiderstand des Stators des Schrittmotors bestimmen die elektrische Motorzeitkonstante Te = L / R, die für die Auslegung des Stromreglers maßgeblich ist.