Encoder
- 1. Im Solution Explorer unter „I/O“ das Device „EP7041-0000“ auswählen und den Tab „Process Data“ öffnen.
- 2. Das Predefined PDO Assignment „1 Ch. Compact“ auswählen, falls der eingesetzte Encoder eine Auflösung von höchstens 32 Bit Singleturn+Multiturn hat.
- Die Berechnung in der TwinCAT NC erfolgt intern mit 32-Bit-Positionswerten.
- 3. Im Solution Explorer den Punkt MOTION > NC-Task 1 SAF > Axis n > Enc auswählen
- 4. Den Tab „NC-Encoder“ öffnen und „Link To (all Types)“ anklicken

- 5. Das Device EP7041-0000 auswählen.
(Falls Sie die Box ohne Encoder betreiben wollen, wählen Sie den Eintrag „(None)“)
- 6. Den Tab „Parameter“ öffnen und die folgenden Parameter einstellen:
Invert Encoder Counting Direction
Falls die positive Drehrichtung des Motors entgegengesetzt der positiven Zählrichtung des Encoders ist, setzen Sie diesen Parameter auf „TRUE“.
„Scaling Factor Numerator“ und „Scaling Factor Denominator“
Der „Scaling Factor“ ist ein Maß für den Weg oder den Winkel, der einer bestimmten Anzahl von Encoder-Schritten entspricht. Er wird in der TwinCAT NC als Bruch mit Zähler (Numerator) und Nenner (Denominator) angegeben.
Für rotatorische Achsen mit Absolutwertgeber (BiSS, SSI):
- Scaling Factor Numerator = 360°
- Scaling Factor Denominator = 2N, mit N = Singleturn-Auflösung [Bit]
Beispiel mit 13 Bit Singleturn-Auflösung: 213 = 8192dez.
Encoder Mask (maximum encoder value)
Berechnen Sie die Encoder Mask mit der folgenden Formel und tragen Sie das Ergebnis als Hexadezimalzahl ein:

Beispiel für 13 Bit Singleturn-Auflösung und 12 Bit Multiturn-Auflösung:

Encoder Sub Mask (absolute range maximum value)
Berechnen Sie die Encoder Sub Mask mit der folgenden Formel und tragen Sie das Ergebnis als Hexadezimalzahl ein:
Wert eintragen (hexadezimal):

Beispiel für 13 Bit Singleturn:

Totzeitkompensation
Die Totzeitkompensation der Achse kann in der Registerkarte Time Compensation der Encoder-Einstellungen Achse1_ENC eingestellt werden. Sie sollte theoretisch 3 Zyklen der NC-Zykluszeit betragen, besser haben sich jedoch 4 Zyklen der NC-Zykluszeit erwiesen. Dazu sollten die Parameter Time Compensation Mode Encoder auf ‚ON (with velocity)‘ und Encoder Delay in Cycles auf 4 eingestellt sein.
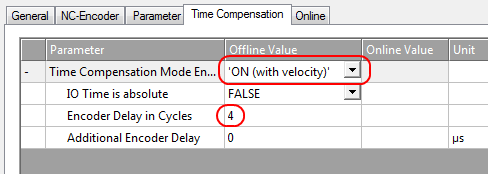 Abb.8: Parameter Totzeitkompensation
Abb.8: Parameter Totzeitkompensation