Prozessdatenobjekte EP7041-4032
Das Device EP7041-4032 enthält die Prozessdaten für den Schrittmotor.
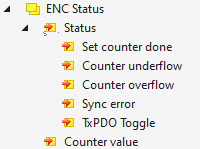
ENC Status
| Set counter done Counter underflow Counter overflow Sync error TxPDO Toggle Counter value |
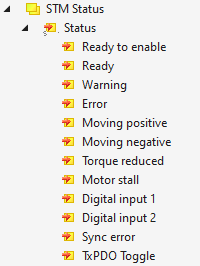
STM Status
| Ready to enable Ready Warning Error Moving positive Moving negative Torque reduced Motor stall Digital input 1 Digital input 2 |
ENC Control
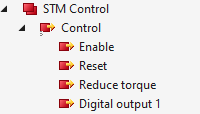
STM Control
| Enable Reset Reduce torque Digital output 1 |
STM Velocity
| Velocity Soll-Geschwindigkeit, bezogen auf den Parameter 8012:05 „Speed range“. |