Neigungsmessung
Die Berechnung eines Winkels mit hoher Auflösung und Genauigkeit sollte auf einem PC stattfinden. Die Genauigkeit der verwendeten Sensoren erlauben eine Genauigkeit von < 0,1°.
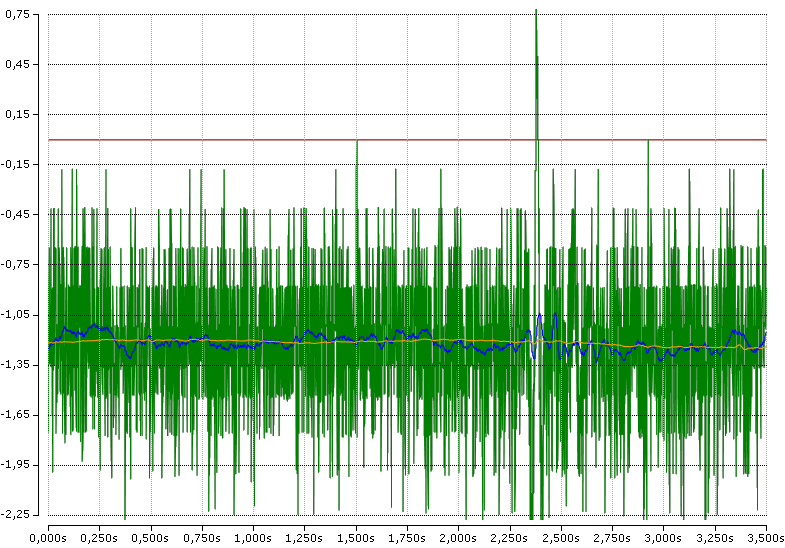
Da die Winkelwerte aus den Beschleunigungswerten abgeleitet werden und diese mit einem bestimmten Rauschen beaufschlagt sind, muss der Winkelwert mittels geeigneter Algorithmen gefiltert werden.
Dies kann im einfachsten Fall z. B. ein gleitender Mittelwert sein.
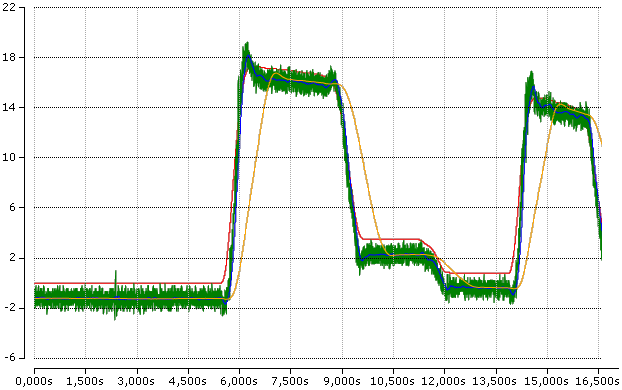
Farbe | Bedeutung |
|---|---|
Rot | Winkel gemessen mit 1024-Schritt-Encoder / 4-fach Auswertung als Referenz |
Grün | trigonmetrisch im PC errechneter Winkel, ohne Rauschunterdrückung |
blau | schneller Algorithmus |
gelb | arithmetisches Mittel (1000 Werte gleitend) |
Beispiel

Formel zur Berechnung des Winkels α:

Umsetzung in TwinCAT:
alpha := ATAN(a_y1 / (SQRT(a_x1 * a_x1 + a_z1 * a_z1))) * 360/(2*3.14);
Beispielprogramm
Hinweis | |
Verwendung des Beispielprogramms Dieses Dokument enthält exemplarische Anwendungen unserer Produkte für bestimmte Einsatzbereiche. Die hier dargestellten Anwendungshinweise beruhen auf den typischen Eigenschaften unserer Produkte und haben ausschließlich Beispielcharakter. Die mit diesem Dokument vermittelten Hinweise beziehen sich ausdrücklich nicht auf spezifische Anwendungsfälle, daher liegt es in der Verantwortung des Kunden zu prüfen und zu entscheiden, ob das Produkt für den Einsatz in einem bestimmten Anwendungsbereich geeignet ist. Wir übernehmen keine Gewährleistung, dass der in diesem Dokument enthaltene Quellcode vollständig und richtig ist. Wir behalten uns jederzeit eine Änderung der Inhalte dieses Dokuments vor und übernehmen keine Haftung für Irrtümer und fehlenden Angaben. |
Zum Download des Beispielprogramms aus dieser Dokumentation heraus klicken Sie bitte auf den Link:  (Beispieldatei)
(Beispieldatei)