Optimierung des Drehzahlreglers
Der Drehzahlregler ist ein PI-Regler.
Die folgenden Parameter werden in diesem Kapitel optimiert:
- Der Integral-Anteil Tn
- Der Proportional-Anteil Kp.
Vorbereitung
- 1. Das Menü „Run motor“ öffnen
- 2. Den Button „Start record“ anklicken

- Das Scope View zeichnet die Position, die Drehzahl und den Schleppfehler auf.
- 3. Unter „NC“: „Functions“ auswählen
- 4. Im Feld „Start mode“ den Eintrag „Reversing sequence“ auswählen
- 5. In die folgenden Feldern realistische Werte eintragen:
Target position 1
Target velocity
Target position 2 - 6. Den Button „Start“ anklicken
- Der Motor führt die eingestellte Bewegung periodisch aus.
- 7. Bei Bedarf die Beschleunigungszeit reduzieren
Siehe Kapitel Dynamik. - 8. Unter „Drive Parameters“ die Registerkarte „Velocity control“ auswählen
- Hier können Sie die Reglerparameter des Drehzahlreglers einstellen.
Optimierung des Integral-Anteils Tn
- 1. Den Wert Tn schrittweise reduzieren
Jede Eingabe mit [Strg] + [Enter] bestätigen
Währenddessen das Scope View beobachten - Ab einem bestimmten Wert von Tn fängt der Motor an zu schwingen.
Beispiel ohne Schwingen: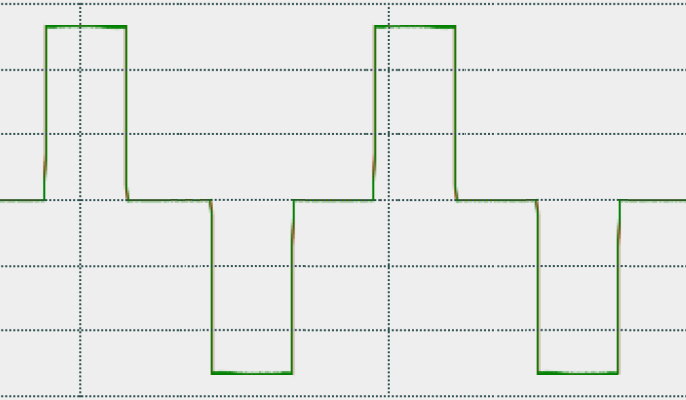
Beispiel mit Schwingen: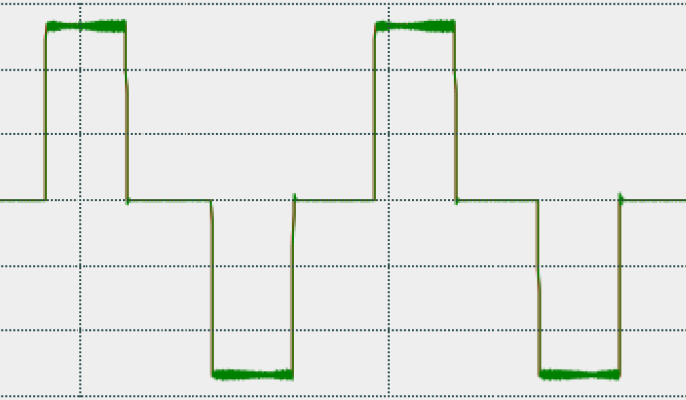
Ab hier den Wert Tn nicht weiter reduzieren. - 2. Tn wieder erhöhen, bis der Motor nicht mehr schwingt
- 3. Tn noch ein bisschen erhöhen
Abhängig von der Applikation.
- Der Integral-Anteil Tn ist optimiert.
Optimierung des Proportional-Anteils Kp
Die Optimierung von Kp erfolgt analog zu der Optimierung von Tn. Allerdings müssen Sie Kp nicht reduzieren, sondern erhöhen.
- 1. Den Wert Kp schrittweise erhöhen
Jede Eingabe mit [Strg] + [Enter] bestätigen
Währenddessen das Scope View beobachten - Ab einem bestimmten Wert von Tn fängt der Motor an zu schwingen. Siehe oben.
- 2. Kp wieder reduzieren, bis der Motor nicht mehr schwingt
- 3. Kp noch ein bisschen reduzieren. Abhängig von der Applikation