Konfiguration der TwinCAT NC
Die TwinCAT NC kann durch Parameter konfiguriert werden. Eine vollständige Beschreibung der Parameter der TwinCAT NC finden Sie in der Dokumentation der TwinCAT-Functions TF50x0 oder auf unserer Website: https://www.beckhoff.de/tf5000.
Stellen Sie die folgenden Parameter gewissenhaft ein:
Basiseinheit
Diese Einstellung legt die Einheiten der Parameter der Achse fest.
Sie finden diese Einstellung unter:
NC-Achse > Karteireiter „Settings“ > Drop-Down-Menü „Unit“.
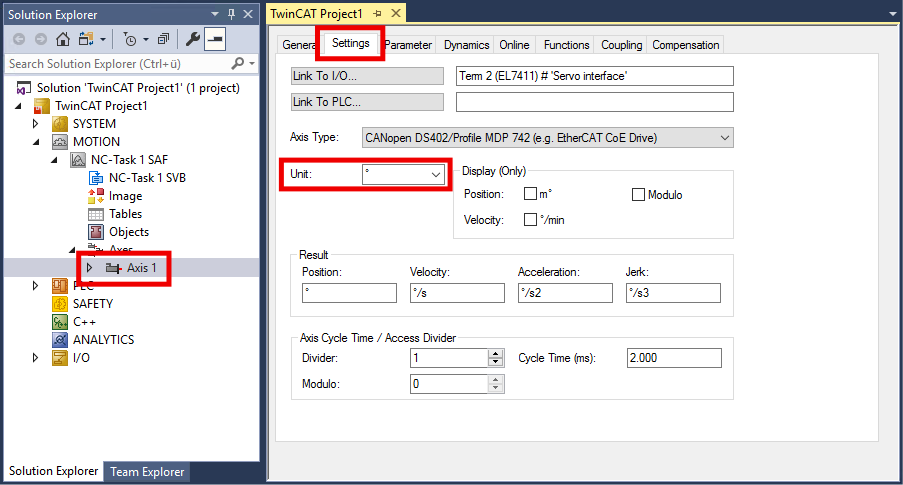
- Für rotatorische Bewegungen wählen Sie ° oder „Degree“.
- Für lineare Bewegungen wählen Sie mm oder m.
Bezugsgeschwindigkeit und Maximalgeschwindigkeit
Sie finden diese Parameter unter:
NC-Achse > Karteireiter „Parameter“ > „Reference Velocity“ und „Maximum Velocity“
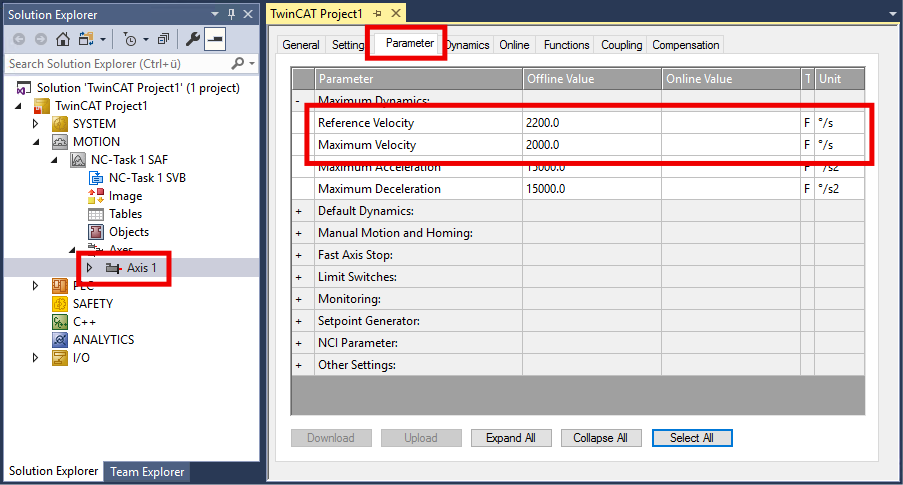
Empfehlung: tragen Sie für die „Reference Velocity“ die Nenndrehzahl bzw. Nenngeschwindigkeit ein.
Dynamik
Sie finden die Dynamik-Parameter unter:
NC-Achse > Karteireiter „Dynamics“
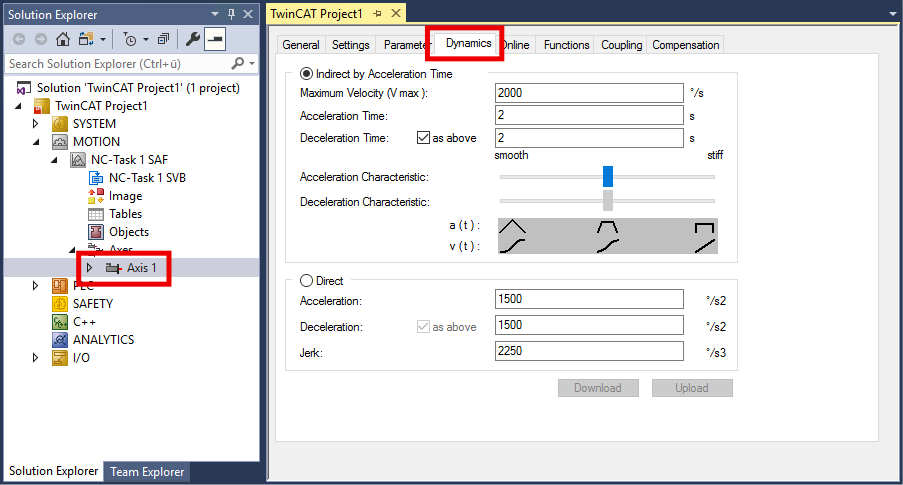
Stellen Sie die Hochlaufzeit und die Bremszeit ein: „Acceleration Time“ und „Deceleration Time“.
Wählen Sie den Rampenverlauf über die Schieberegler.
Encoder-Skalierungsfaktor für rotatorische Achsen
Sie finden diesen Parameter unter:
NC-Achse > „Enc“ > Karteireiter „Parameter“
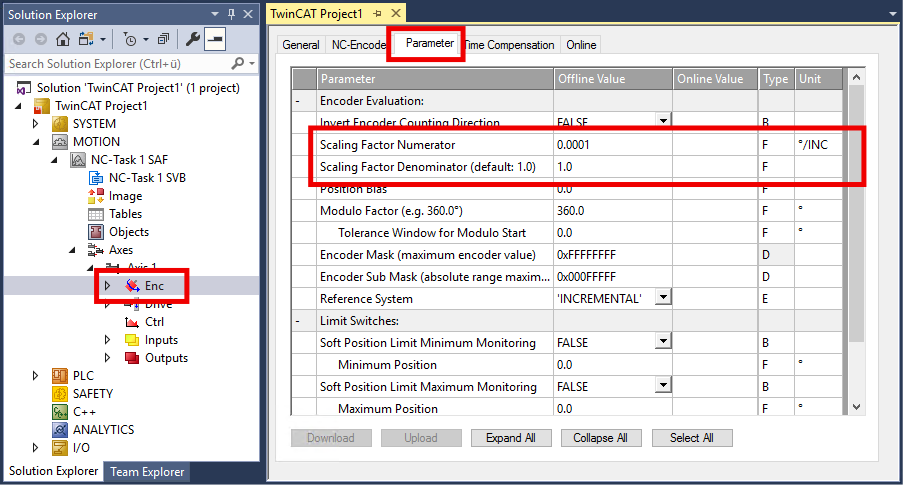
Der Encoder-Skalierungsfaktor wird als Bruch angegeben. Es gibt einen Parameter für den Zähler und einen Parameter für den Nenner.
- Zähler: „Scaling Factor Numerator“
- Nenner: „Scaling Factor Denominator“
Der Wert für den Encoder-Skalierungsfaktor ist abhängig davon, ob Sie einen Inkremental-Encoder einsetzen:
- Für den Betrieb mit einem Inkremental-Encoder:
- „Scaling Factor Numerator“: 360°
- „Scaling Factor Denominator“: Die Auflösung des Inkremental-Encoders, multipliziert mit dem Faktor vier.
Einheit: Inkremente pro Umdrehung.
Beispiel mit 1024 Inkrementen: 1024 x 4 = 4096 - Für den Betrieb ohne Inkremental-Encoder:
- „Scaling Factor Numerator“: 360°
- „Scaling Factor Denominator“: 65536
Encoder-Skalierungsfaktor für Linearachsen
- „Scaling Factor Numerator“: 1 mm
- „Scaling Factor Denominator“:
- Rechnen Sie die Auflösung des Inkremental-Encoders in Inc / mm um.
- Multiplizieren Sie die Auflösung mit dem Faktor vier.
- Tragen Sie das Ergebnis in den Parameter „Scaling Factor Denominator“ ein.
Beispiel:
Die Auflösung des Inkremental-Encoders ist mit 512 Inc / (2 mm) angegeben. Das entspricht 256 Inc / mm.
Tragen Sie für den „Scaling Factor Denominator“ ein: 256 x 4 = 1024.
Ausgabeskalierung für die Geschwindigkeit
Sie finden diesen Parameter unter:
NC-Achse > „Drive“ > Karteireiter „Parameter“
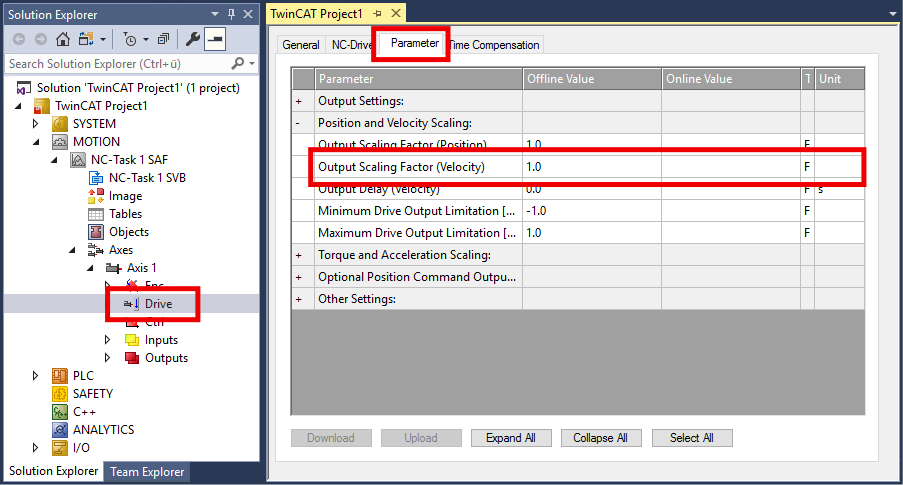
Die Ausgabeskalierung der Geschwindigkeit ist nur für die Betriebsart CSV relevant.
Die Berechnung ist abhängig davon, ob Sie einen Inkremental-Encoder einsetzen:
- Für den Betrieb mit einem Inkremental-Encoder:

Beispiel: für einen Encoder mit 1024 Inkrementen pro Umdrehung ergibt sich eine Ausgabeskalierung von 10,98632813. - Für den Betrieb ohne Inkremental-Encoder:
