Einbindung in die NC-Konfiguration (manuell)
(Master: TwinCAT 2.11)
 | EtherCAT XML Device Description Die Darstellung entspricht der Anzeige der CoE-Objekte aus der EtherCAT XML Device Description. Es wird empfohlen, die entsprechende aktuellste XML-Datei im Download-Bereich auf der Beckhoff Website herunterzuladen und entsprechend der Installationsanweisungen zu installieren. |
Die Einbindung an die NC kann wie folgt durchgeführt werden:
- Die Klemme muss bereits unter E/A-Geräte manuell eingefügt oder vom System eingescannt worden sein (siehe Kapitel Konfigurationserstellung in TwinCAT).
- Fügen Sie zuerst einen neuen Task an. Dazu klicken Sie mit der rechten Maustaste auf NC-Konfiguration und wählen Sie "Task Anfügen..." aus (siehe Abb. Neuen Task einfügen).
- Benennen Sie gegebenenfalls den Task um und bestätigen Sie mit OK.
- Wählen Sie mit der rechten Maustaste Achsen aus und fügen anschließend eine neue Achse an (siehe Abb. Auswahl einer neuen Achse).
- Wählen Sie unter Typ eine Kontinuierliche Achse aus und bestätigen Sie mit OK (siehe Abb. Achsentyp auswählen und bestätigen).
- Markieren Sie Ihre Achse mit der linken Maustaste. Unter der Registerkarte Einstellungen wählen Sie "Verknüpft mit..." aus (siehe Abb. Verknüpfung der Achse mit der Klemme).
- Wählen Sie die passende Klemme aus (DC Drive (MDP 733)) und bestätigen Sie mit "OK ". Achten Sie darauf, dass jede Klemme zwei Motoren ansteuern kann. Wählen Sie den Kanal, den Sie angeschlossen haben.
- Alle wichtigen Verknüpfungen zwischen der NC-Konfiguration und der Klemme werden dadurch automatisch durchgeführt (siehe Abb. Automatische Verknüpfung aller wichtigen Variablen)
 Abb.145: Neuen Task einfügen
Abb.145: Neuen Task einfügen 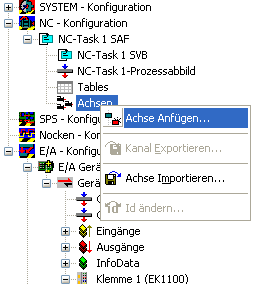 Abb.146: Auswahl einer neuen Achse
Abb.146: Auswahl einer neuen Achse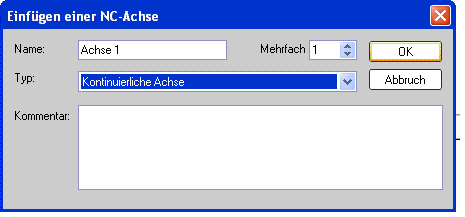 Abb.147: Achsentyp auswählen und bestätigen
Abb.147: Achsentyp auswählen und bestätigen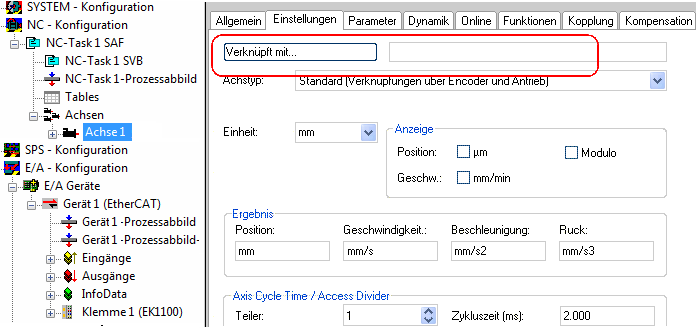 Abb.148: Verknüpfung der Achse mit der Klemme
Abb.148: Verknüpfung der Achse mit der Klemme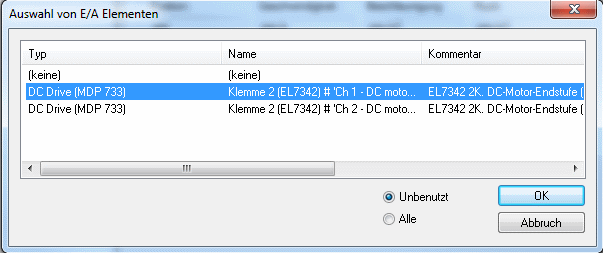 Abb.149: Auswahl der richtigen Klemme
Abb.149: Auswahl der richtigen Klemme Abb.150: Automatische Verknüpfung aller wichtigen Variablen
Abb.150: Automatische Verknüpfung aller wichtigen VariablenDamit der Motor in Betrieb genommen werden kann, müssen noch einige Parameter eingestellt werden. Die Werte entnehmen Sie dem Kapitel Konfiguration der wichtigsten Parameter.
Stellen Sie bitte diese Parameter ein, bevor Sie mit der Inbetriebnahme des Motors fortfahren.