CoE-Interface
Allgemeine Beschreibung
Das CoE-Interface (CAN application protocol over EtherCAT Interface) ist die Parameterverwaltung für EtherCAT-Geräte. EtherCAT-Slaves oder auch der EtherCAT-Master verwalten darin feste (ReadOnly) oder veränderliche Parameter, die sie zum Betrieb, Diagnose oder Inbetriebnahme benötigen.
CoE-Parameter sind in einer Tabellen-Hierarchie angeordnet und prinzipiell dem Anwender über den Feldbus zugänglich. Der EtherCAT-Master (TwinCAT System Manager) kann über EtherCAT auf die lokalen CoE-Verzeichnisse der Slaves zugreifen und je nach Eigenschaften lesend oder schreibend einwirken.
Es sind verschiedene Typen für CoE-Datentypen möglich wie String (Text), Integer-Zahlen, Bool'sche Werte oder größere Byte-Felder. Damit lassen sich ganz verschiedene Eigenschaften beschreiben. Beispiele für solche Parameter sind Herstellerkennung, Seriennummer, Prozessdateneinstellungen, Gerätename, Abgleichwerte für analoge Messungen oder Passwörter.
Die Ordnung erfolgt in zwei Ebenen über hexadezimale Nummerierung:
Zuerst wird der (Haupt)Index genannt, dann der Subindex.
Die Wertebereiche sind:
- Index: 0x0000…0xFFFF (0...65535dez)
- Subindex: 0x00…0xFF (0...255 dez)
Üblicherweise wird ein so lokalisierter Parameter geschrieben als 0x8010:07 mit voranstehendem „0x“ als Kennzeichen des hexadezimalen Zahlenraumes und Doppelpunkt zwischen Index und Subindex.
Die für den EtherCAT-Feldbusanwender wichtigen Bereiche sind
- 0x1000: Hier sind feste Identitätsinformationen zum Gerät hinterlegt wie Name, Hersteller, Seriennummer etc. Außerdem liegen hier Angaben über die aktuellen und verfügbaren Prozessdatenkonstellationen.
- 0x8000: Hier sind die für den Betrieb erforderlichen funktionsrelevanten Parameter für alle Kanäle zugänglich wie Filtereinstellung oder Ausgabefrequenz.
Weitere wichtige Bereiche sind:
- 0x4000: Hier befinden sich bei manchen EtherCAT-Geräten die Kanalparameter. Historisch war dies der erste Parameterbereich, bevor der 0x8000 Bereich eingeführt wurde. EtherCAT-Geräte, die früher mit Parametern in 0x4000 ausgerüstet wurden und auf 0x8000 umgestellt wurden, unterstützen aus Kompatibilitätsgründen beide Bereiche und spiegeln intern.
- 0x6000: Hier liegen die Eingangs-PDO („Eingänge“ aus Sicht des EtherCAT-Masters)
- 0x7000: Hier liegen die Ausgangs-PDO („Ausgänge“ aus Sicht des EtherCAT-Masters)
 | Verfügbarkeit Nicht jedes EtherCAT-Gerät muss über ein CoE-Verzeichnis verfügen. Einfache I/O-Module ohne eigenen Prozessor verfügen in der Regel über keine veränderlichen Parameter und haben deshalb auch kein CoE-Verzeichnis. |
Wenn ein Gerät über ein CoE-Verzeichnis verfügt, stellt sich dies im TwinCAT System Manager als ein eigener Karteireiter mit der Auflistung der Elemente dar:
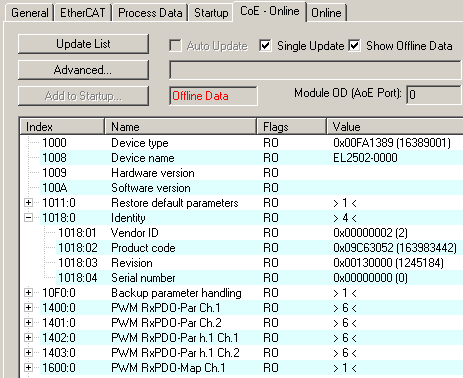 Abb.10: Karteireiter „CoE-Online“
Abb.10: Karteireiter „CoE-Online“ In der Abbildung „Karteireiter ‚CoE-Online‘“ sind die im Gerät „EL2502“ verfügbaren CoE-Objekte von 0x1000 bis 0x1600 zu sehen, die Subindizes von 0x1018 sind aufgeklappt.
Hinweis | |
Veränderungen im CoE-Verzeichnis (CAN over EtherCAT-Verzeichnis), Programmzugriff Beachten Sie bei Verwendung/Manipulation der CoE-Parameter die allgemeinen CoE-Hinweise im Kapitel „CoE-Interface“ der EtherCAT-System-Dokumentation:
|
Datenerhaltung und Funktion „NoCoeStorage“
Einige, insbesondere die vorgesehenen Einstellungsparameter des Slaves, sind veränderlich und beschreibbar,
- über den System Manager (siehe Abb. „Karteireiter ‚CoE-Online‘“) durch Anklicken.
Dies bietet sich bei der Inbetriebnahme der Anlage bzw. Slaves an. Klicken Sie auf die entsprechende Zeile des zu parametrierenden Indizes und geben Sie einen entsprechenden Wert im „SetValue“-Dialog ein. - aus der Steuerung bzw. PLC über ADS z. B. durch die Bausteine aus der TcEtherCAT.lib Bibliothek.
Dies wird für Änderungen während der Anlagenlaufzeit empfohlen oder wenn kein System Manager bzw. Bedienpersonal zur Verfügung steht.
| Datenerhaltung Werden online auf dem Slave CoE-Parameter geändert, wird dies in Beckhoff-Geräten üblicherweise ausfallsicher im Gerät (EEPROM) gespeichert. D. h. nach einem Neustart (Re Power) sind die veränderten CoE-Parameter immer noch erhalten.
|
| Startup-Liste Veränderungen im lokalen CoE-Verzeichnis der Klemme gehen im Austauschfall mit der alten Klemme verloren. Wird im Austauschfall eine neue Klemme mit Beckhoff Werkseinstellungen eingesetzt, bringt diese die Standardeinstellungen mit. Es ist deshalb empfehlenswert, alle Veränderungen im CoE-Verzeichnis eines EtherCAT-Slaves in der Startup-Liste des Slaves zu verankern, die bei jedem Start des EtherCAT-Feldbus abgearbeitet wird. So wird auch im Austauschfall ein neuer EtherCAT-Slave automatisch mit den Vorgaben des Anwenders parametriert. Wenn EtherCAT-Slaves verwendet werden, die lokal CoE-Werte nicht dauerhaft speichern können, ist zwingend die Startup-Liste zu verwenden. |
Empfohlenes Vorgehen bei manueller Veränderung von CoE-Parametern
- Gewünschte Änderung im System Manager vornehmen
(Werte werden lokal im EtherCAT-Slave gespeichert). - Wenn der Wert dauerhaft Anwendung finden soll, einen entsprechenden Eintrag in der Startup-Liste vornehmen. Die Reihenfolge der Startup-Einträge ist dabei i.d.R. nicht relevant.
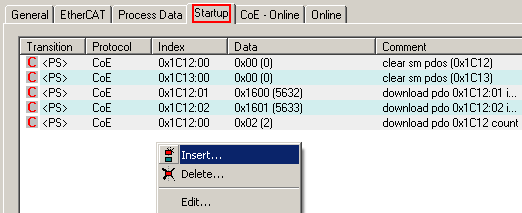 Abb.11: Startup-Liste im TwinCAT System Manager
Abb.11: Startup-Liste im TwinCAT System Manager In der Startup-Liste können bereits Werte enthalten sein, die vom System Manager nach den Angaben der ESI dort angelegt werden. Zusätzliche anwendungsspezifische Einträge können ebenfalls angelegt werden.
Online- / Offline Verzeichnis
Im Rahmen der Arbeit mit dem TwinCAT System Manager ist zu differenzieren, ob das EtherCAT-Gerät gegenwärtig „verfügbar“ ist, also angeschaltet und über EtherCAT verbunden ‒ somit online ‒ oder ob eine Konfiguration offline erstellt wird, ohne dass Slaves angeschlossen sind.
In beiden Fällen ist ein CoE-Verzeichnis nach Abb. „Karteireiter ‚CoE-Online‘“ zu sehen, die Konnektivität wird allerdings als offline oder online angezeigt.
- Wenn der Slave offline ist,
- wird das Offline-Verzeichnis aus der ESI-Datei angezeigt; Änderungen sind hier nicht sinnvoll bzw. möglich.
- wird in der Identität der konfigurierte Stand angezeigt.
- wird kein Firmware- oder Hardware-Stand angezeigt, da dies Eigenschaften des realen Gerätes sind.
- ist ein rotes Offline Data zu sehen.
- Wenn der Slave online ist,
- wird das reale, aktuelle Verzeichnis des Slaves ausgelesen; dies kann je nach Größe und Zykluszeit einige Sekunden dauern.
- wird die tatsächliche Identität angezeigt.
- wird der Firmware- und Hardware-Stand des Gerätes im CoE angezeigt.
- ist ein grünes Online Data zu sehen.
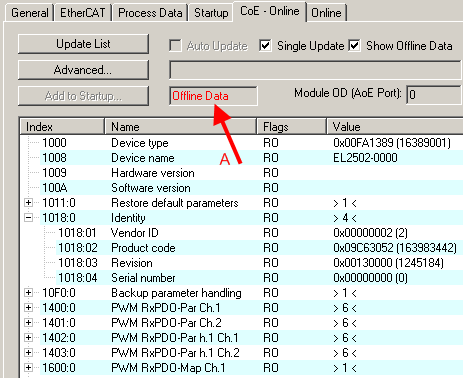 Abb.12: Offline-Verzeichnis
Abb.12: Offline-Verzeichnis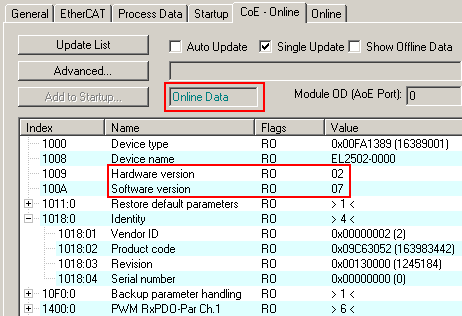 Abb.13: Online-Verzeichnis
Abb.13: Online-Verzeichnis Kanalweise Ordnung
Das CoE-Verzeichnis ist in EtherCAT-Geräten angesiedelt, die meist mehrere funktional gleichwertige Kanäle umfassen; z. B. hat eine vierkanalige Analogeingangsklemme auch vier logische Kanäle und damit vier gleiche Sätze an Parameterdaten für die Kanäle. Um in den Dokumentationen nicht jeden Kanal auflisten zu müssen, wird gerne der Platzhalter „n“ für die einzelnen Kanalnummern verwendet.
Im CoE-System sind für die Menge aller Parameter eines Kanals eigentlich immer 16 Indizes mit jeweils 255 Subindizes ausreichend. Deshalb ist die kanalweise Ordnung in 16dez bzw.10hex-Schritten eingerichtet. Am Beispiel des Parameterbereichs 0x8000 sieht man dies deutlich:
- Kanal 0: Parameterbereich 0x8000:00 ... 0x800F:255
- Kanal 1: Parameterbereich 0x8010:00 ... 0x801F:255
- Kanal 2: Parameterbereich 0x8020:00 ... 0x802F:255
- ...
Allgemein wird dies geschrieben als 0x80n0.
Ausführliche Hinweise zum CoE-Interface finden Sie in der EtherCAT-Systemdokumentation auf der Beckhoff Website.
BackUp-Objekte und Checksumme 0x10F0:01
In Bezug auf den Informationserhalt sind für das CoE-Parameter-/Objektverzeichnis u. a. folgende Objekttypen definiert, die aber nicht alle zugleich in jedem Gerät vorkommen müssen:
- Vendor-Objekte
- Sind persistent (versorgungsausfallsicher) im Gerät gespeichert.
- Technisch mit der Eigenschaft ReadWrite (RW).
- Sie sind nur unter Kenntnis des jeweiligen Herstellerpassworts änderbar/löschbar.
- Sie werden für herstellerbezogene Justage- oder Identitätsdaten verwendet.
- BackUp-Objekte
- Das sind Objekte die persistent im Gerät gespeichert werden, auch nach Änderung.
- Technisch mit der Eigenschaft ReadWrite (RW).
- Sie sind jederzeit durch CoE-Zugriff aus dem EtherCAT-Master änderbar/löschbar
- Insbesondere werden sie durch „Restore Default Parameters“ (siehe Kapitel „Wiederherstellen des Auslieferungszustandes“) auf den Default-/Initialzustand zurückgesetzt, wie er in der Firmware unveränderlich gespeichert ist. Da dieses Zurücksetzen auf einen ehemaligen Wert wie die Wiederherstellung eines Backups erscheint, werden sie „BackUp-Objekte“ genannt.
- Sie werden für reguläre Funktionsparameter des Geräts verwendet, die das Verhalten festlegen.
- BackUp-Objekte mit Schreibschutzmöglichkeit.
- Es gilt das Gleiche wie für die Backup-Objekte.
- Zusätzlich kann der Anwender für diese Objekte einen Schreibschutz per Codewort in xF009 aktivieren und so die versehentliche Veränderung blockieren. Details dazu finden sich in den Gerätedokumentationen der Geräte, die diese Objekte enthalten.
- Volatile Objekte
- Das sind Objekte, die nicht persistent im Gerät gespeichert werden.
- Sie werden zur Anzeige von internen Informationen (Prozessdaten, Zustände, Temperaturen …) verwendet und sind als ReadOnly (RO) oder als Funktionsparameter (ReadWrite) verfügbar. Letztere müssen jedoch bei jedem PowerOn vom EtherCAT Master beschrieben werden, wenn sie einen anderen Wert als den Default-Wert haben sollen.
Über den aktuellen Zustand der sogenannten BackUp-Objekte zeigt das Gerät eine 16-Bit-CRC im 32-Bit-Objekt 0x10F0:01 CheckSum, Subindex 01 von Backup Parameter Handling an:
 Abb.14: CoE Index 10F0
Abb.14: CoE Index 10F0Wird ein BackUp-Objekt verändert, errechnet die Firmware entsprechend eine neue Checksumme. Diese kann verwendet werden, um Änderungen der BackUp-Objekte festzustellen.
Hinweis: Der Initialwert kann sich je nach Firmware-Stand ändern, wenn durch Funktionserweiterungen Objekte in den Erfassungsbereich der CRC dazukommen.