Reaktionszeiten TwinSAFE
Die TwinSAFE-Klemmen bilden ein modular aufgebautes Sicherheitssystem, welches über das Safety-over-EtherCAT-Protokoll sicherheitsgerichtete Daten austauscht. Dieses Kapitel soll dabei helfen die Reaktionszeit des Systems vom Signalwechsel am Sensor bis zur Reaktion am Aktor zu bestimmen.
Typische Reaktionszeit
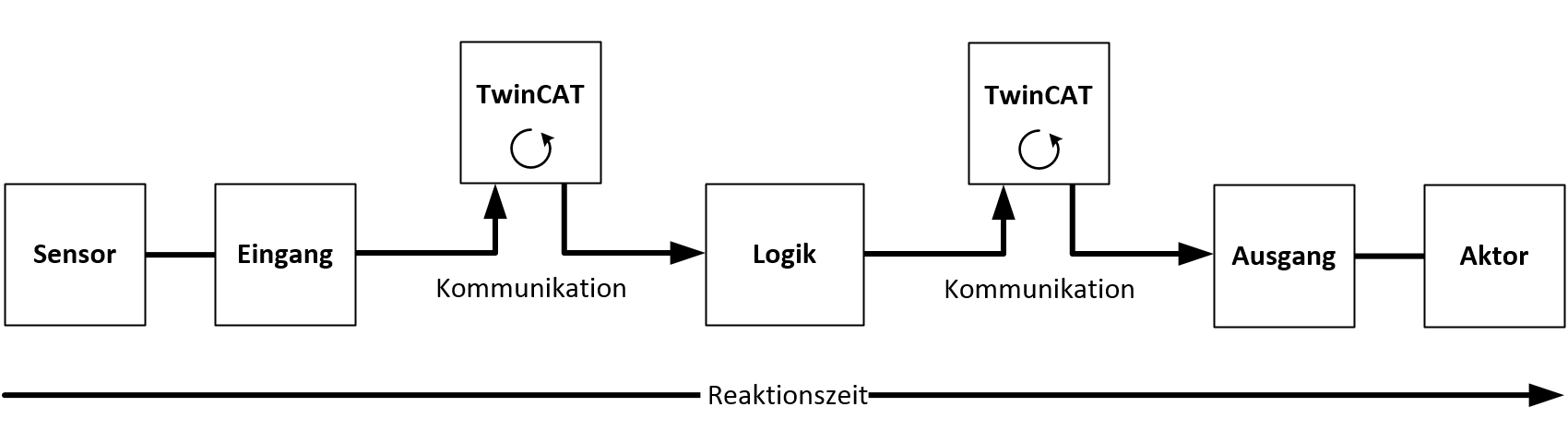
Die typische Reaktionszeit ist die Zeit, die benötigt wird um eine Information vom Sensor zum Aktor zu übermitteln, wenn das Gesamtsystem fehlerfrei im Normalbetrieb arbeitet.
|
Definition |
Beschreibung |
|---|---|
|
RTSensor |
Reaktionszeit des Sensors, bis das Signal an der Schnittstelle zur Verfügung gestellt wird. Wird typischerweise vom Sensorhersteller geliefert. |
|
RTInput |
Reaktionszeit des sicheren Eingangs, wie z.B. EL1904 oder EP1908. Diese Zeit kann aus den technischen Daten entnommen werden. Bei der EL1904 sind dies 4 ms. |
|
RTComm |
Reaktionszeit der Kommunikation. Diese ist typischerweise 3x die EtherCAT Zykluszeit, da neue Daten immer erst in einem neuen Safety-over-EtherCAT Telegramm versendet werden können. Diese Zeiten hängen von der übergeordneten Standard-Steuerung direkt ab (Zykluszeit der PLC/NC). |
|
RTLogic |
Reaktionszeit der Logikklemme. Dieses ist die Zykluszeit der Logikklemme und beträgt typischerweise 500 µs bis 10 ms für die EL6900, je nach Safety-Projektgröße. Die tatsächliche Zykluszeit kann aus der Klemme ausgelesen werden. |
|
RTOutput |
Reaktionszeit der Ausgangsklemme. Diese liegt typischerweise im Bereich von 2 bis 3 ms. |
|
RTActor |
Reaktionszeit der Servoklemme vom Abschalten der 24 V an Klemmstelle 13 bis zum sicheren Abschalten der Gatetreiber (Under Voltage Lockout). Diese Zeit beträgt typischerweise 20 ms. |
|
WDComm |
Watchdog-Zeit der Kommunikation |
Es ergibt sich für die typische-Case Reaktionszeit folgende Formel:

mit z.B.

Worst-Case-Reaktionszeit
Die Worst-Case-Reaktionszeit gibt die Zeit an, die maximal benötigt wird, um im Fehlerfall ein Abschalten des Aktors durchzuführen.
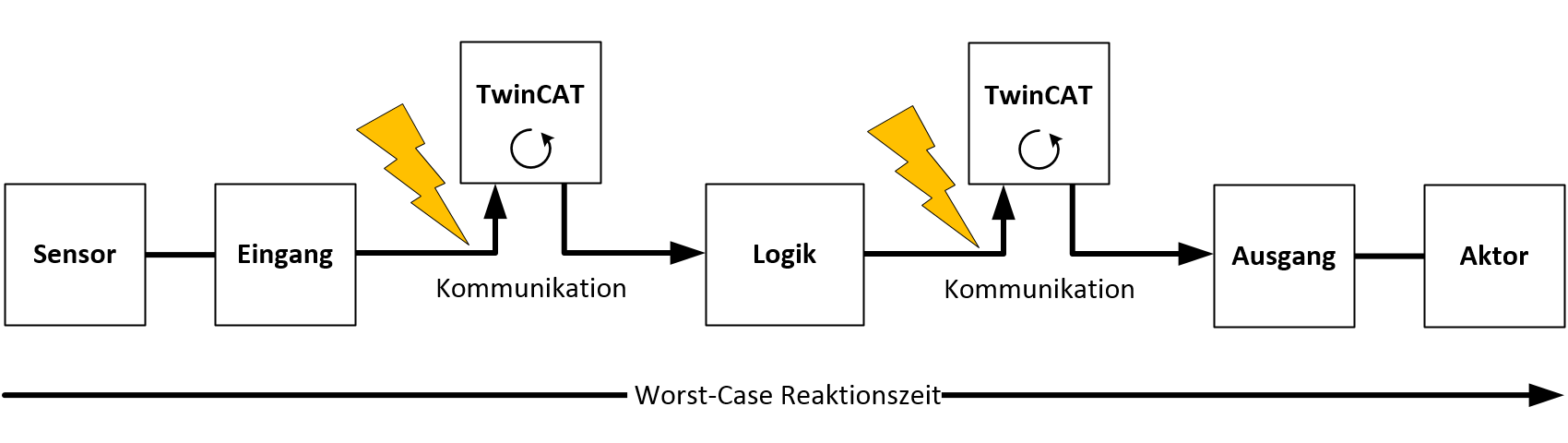
Dabei wird davon ausgegangen, dass am Sensor ein Signalwechsel erfolgt und dieser an den Eingang übermittelt wird. Gerade in dem Moment, wo das Signal an die Kommunikationsschnittstelle übergeben werden soll, tritt eine Kommunikationsstörung auf. Dies wird nach Ablauf der Watchdog-Zeit der Kommunikationsverbindung von der Logik detektiert. Diese Information soll dann an den Ausgang übergeben werden, wobei hier dann eine weitere Kommunkationsstörung auftritt. Diese Störung wird am Ausgang nach Ablauf der Watchdog-Zeit erkannt und führt dann zur Abschaltung.
Damit ergibt sich für die Worst-Case-Reaktionszeit folgende Formel:

mit z.B.
