Konfiguration der wichtigsten Parameter - Einstellungen im CoE-Register
Die hier angegebenen Daten sind beispielhaft für einen Stepper Motor AS 1050-0120 aufgeführt. Bei anderen Motoren und je nach Applikation können die Werte variieren.
Anpassung von Strom und Spannung
Hinweis | |
Überhitzung des Motors möglich! Um den angeschlossenen Motor nicht zu überhitzen, ist es wichtig den Strom und die Spannung, die vom Stepperinterface ausgegeben wird, dem Motor anzupassen. |
Dazu müssen im CoE-Register der Index 0x8010:01 "Maximal current" und der Index 0x8010:03 "Nominal voltage" passend eingestellt werden (siehe Abb. "Anpassung von Strom und Spannung").
Im Index 0x8010:02 kann der Reduced current eingestellt werden. Dadurch wird der Spulenstrom im Stillstand (und damit auch die Verlustleistung) reduziert. Es ist zu beachten, dass sich damit auch das Drehmoment reduziert.
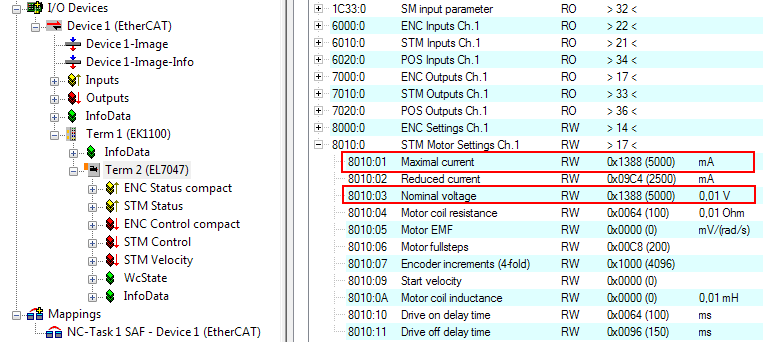 Abb.167: Anpassung von Strom und Spannung
Abb.167: Anpassung von Strom und Spannung Auswahl der Grundfrequenz
Das Microstepping ist fest auf 1/64 eingestellt und kann nicht verändert werden. Es kann jedoch die Grundfrequenz verändert werden (default: 2000). Dazu markieren Sie die Klemme und wählen die Registerkarte CoE-Online aus. Mit einem Doppelklick auf den Index 0x8012:05 "Speed range" können Sie die Grundfrequenz verändern (Abb. "Grundfrequenz einstellen").
 | Anpassung der Bezugsgeschwindigkeit Die Grundfrequenz hängt unmittelbar mit der Bezugsgeschwindigkeit der TwinCAT NC zusammen, so dass die Bezugsgeschwindigkeit immer an eine Veränderung der Grundfrequenz angepasst werden muss. |
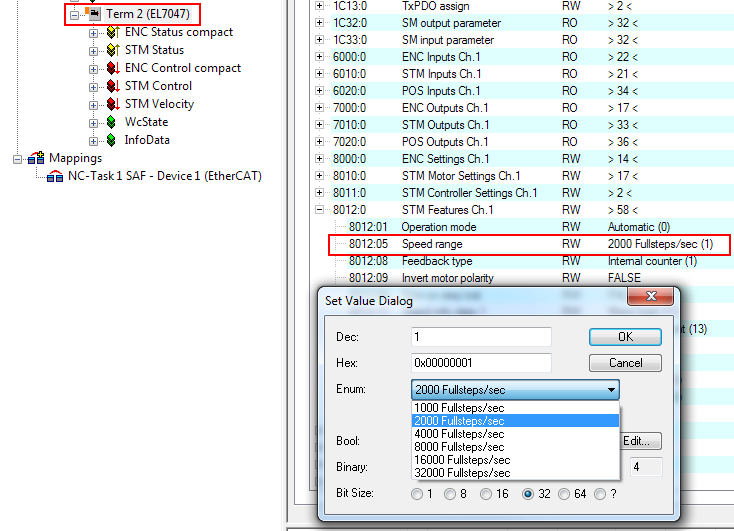 Abb.168: Grundfrequenz einstellen
Abb.168: Grundfrequenz einstellen Auswahl des Feedbacksystems (Nur beim Modul mit Encoder-Anschlüssen)
Beim Feedbacksystem stehen zwei Möglichkeiten zur Auswahl:
- Encoder: Externen Encoder zur Positionsrückführung nutzen
- Internal Counter (default): Internen Zähler zur Positionsrückführung nutzen
| CoE "Feedback type" In der Grundeinstellung ist das Steppermodul auf den internen Zähler gesetzt. Wenn ein externer Encoder eingesetzt wird, muss die Einstellung mit einem Doppelklick auf den Index 0x8012:08 "Feedback type" im Enum-Menü geändert werden (Abb. "Feedbacksystem auswählen"). |
| Anpassung des Skalierungsfaktors Das Feedbacksystem hängt unmittelbar mit dem Skalierungsfaktor der TwinCAT NC zusammen, so dass der Skalierungsfaktor immer an eine Veränderung des Feedbacksystems angepasst werden muss. |
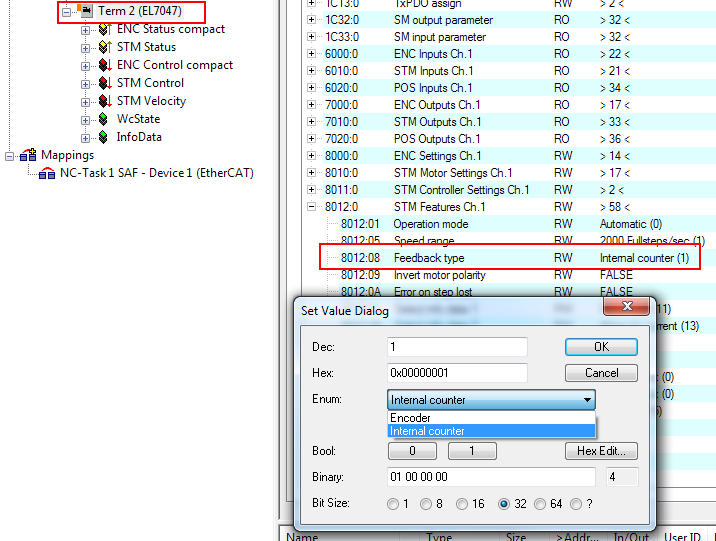 Abb.169: Feedbacksystem auswählen
Abb.169: Feedbacksystem auswählen