Calibration
CALI_PLC_CAM / CALI_HW_SYNC / SET_CALIBRATION / SET_CALIBRATION_AUTO / CLEAR_CALIBRATION:
Der einfachste Fall einer Kalibrierung ist der, nur per Nocke (an einem dig. Eingang angeschlossen) zu kalibrieren.
Hierbei fährt der Motor im 1. Schritt mit der Geschwindigkeit 1 (Index 0x8020:09) in Richtung 1 (Index 0x8021:13) auf die Nocke. Anschließend im 2. Schritt mit der Geschwindigkeit 2 (Index 0x8020:0A) in Richtung 2 (Index 0x8021:14) von der Nocke herunter. Nachdem das "In-Target timeout" (Index 0x8020:0C) abgelaufen ist wird die Kalibrierposition (Index 0x8020:08) als aktuelle Position von der Klemme übernommen.
Hinweis | |
Schalthysterese des Nockenschalters beachten Bei dieser einfachen Kalibrierung muss beachtet werden, dass die Positionserfassung der Nocke nur bedingt genau ist. Die digitalen Eingänge sind nicht interrupt-gesteuert und werden "nur" gepollt. Durch die internen Laufzeiten kann sich deshalb eine systembedingte Positionsdifferenz ergeben. |
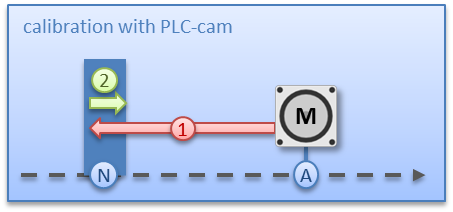 Abb.214: Kalibrierung mit Nocke
Abb.214: Kalibrierung mit Nocke Für eine genauere Kalibrierung wird zusätzlich zu der Nocke ein HW-Sync-Impuls (C-Spur) verwendet. Der Ablauf dieser Kalibrierung erfolgt genau wie oben beschrieben, bis zu dem Zeitpunkt, an dem der Motor von der Nocke herunterfährt. Jetzt wird nicht sofort gestoppt, sondern erst auf den Sync-Impuls gewartet. Anschließend läuft wieder das "In-Target timeout" ab und die Kalibrierposition wird als aktuelle Position von der Klemme übernommen.
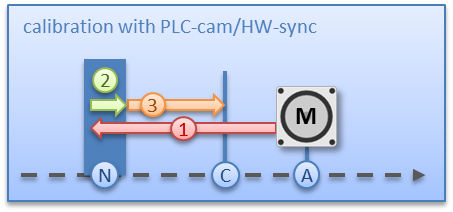 Abb.215: Kalibrierung mit Nocke und C-Spur
Abb.215: Kalibrierung mit Nocke und C-Spur Falls eine Kalibrierung per Hardware, aufgrund der applikatorischen Umstände, nicht möglich ist, kann der Anwender das Bit "Calibrated" auch manuell bzw. automatisch setzen. Das manuelle Setzen bzw. Löschen erfolgt mit den Kommandos "SET_CALIBRATION" und "CLEAR_CALIBRATION".
Einfacher ist es aber, wenn man den Standard-Starttypen (Index 0x8021:01) auf "SET_CALIBRATION_AUTO" konfiguriert. Jetzt wird bei der ersten steigenden Flanke von "Enable" das Bit "Calibrated" automatisch gesetzt. Das Kommando ist nur für diesen Zweck konzipiert, daher ist es nicht sinnvoll es über den synchronen Datenaustausch zu benutzen.