Standard
ABSOLUTE:
Die absolute Positionierung stellt den einfachsten Fall einer Positionierung dar. Es wird eine Position B vorgegeben, welche vom Startpunkt A aus angefahren wird.
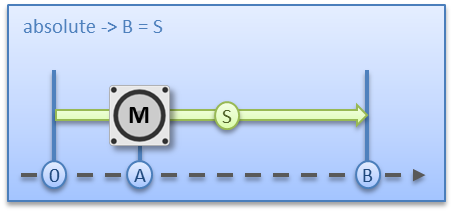 Abb.210: Absolute Positionierung
Abb.210: Absolute Positionierung RELATIVE:
Bei der relativen Positionierung gibt der Anwender ein Positionsdelta S vor, welches zur aktuellen Position A addiert wird und die Zielposition B ergibt.
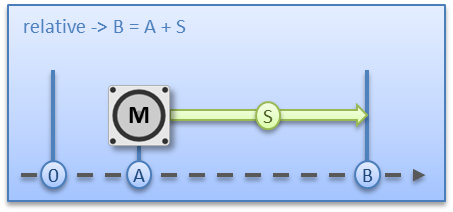 Abb.211: Relative Positionierung
Abb.211: Relative Positionierung ENDLESS_PLUS / ENDLESS_MINUS:
Die beiden Starttypen "ENDLESS_PLUS" und "ENDLESS_MINUS" bieten im "Positioning interface" die Möglichkeit dem Motor eine direkte Geschwindigkeit vorzugeben, um endlos in positiver oder negativer Richtung, mit den vorgegebenen Beschleunigungen, zu fahren.
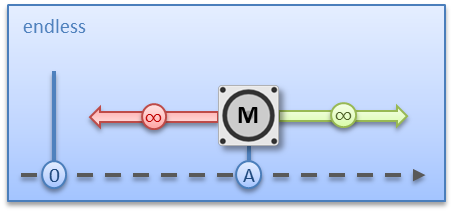 Abb.212: Endlos fahren
Abb.212: Endlos fahren ADDITIVE:
Für die additive Positionierung wird, zur Berechnung der Zielposition B, das vom Anwender vorgegebene Positionsdelta S mit der beim letzten Fahrauftrag verwendeten Zielposition E addiert.
Diese Art der Positionierung ähnelt der relativen Positionierung, hat aber doch einen Unterschied. Wurde der letzte Fahrauftrag mit Erfolg abgeschlossen, ist die neue Zielposition gleich. Gab es aber einen Fehler, sei es dass der Motor in eine Stall-Situation geraten ist oder ein "Emergency stop" ausgelöst wurde, ist die aktuelle Position beliebig und nicht vorausschaubar. Der Anwender hat jetzt den Vorteil, dass er die letzte Zielposition für die Berechnung der folgenden Zielposition nutzen kann.
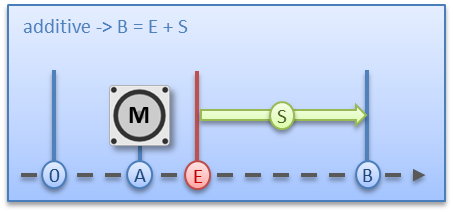 Abb.213: Additive Positionierung
Abb.213: Additive Positionierung