Beispiele
Beispiele von zwei Fahraufträgen mit dynamischer Änderung der Zielposition
Ohne Überfahren der Zielposition
Zeitpunkt | POS Outputs | POS Inputs | Beschreibung |
|---|---|---|---|
t1: | Execute = 1 | Busy = 1 |
|
t2: |
| Accelerate = 0 |
|
t3: | Target position = 100000 |
|
|
t4: |
| Decelerate = 1 |
|
t5: | Execute = 0 | Busy = 0 |
|
t6 - t9: |
|
|
|
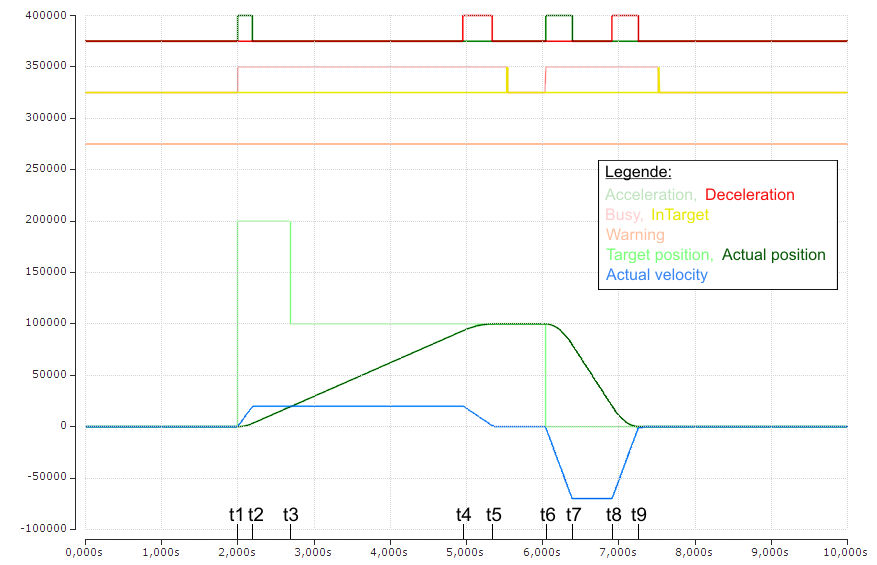 Abb.217: Scope-Aufnahme eines Fahrauftrages mit dynamischer Änderung der Zielposition, ohne Überfahren der Zielposition
Abb.217: Scope-Aufnahme eines Fahrauftrages mit dynamischer Änderung der Zielposition, ohne Überfahren der Zielposition(Die Achsen-Skalierung bezieht sich nur auf die Positionen, nicht auf die Geschwindigkeit und die Status-Bits)
Mit Überfahren der Zielposition
Zeitpunkt | POS Outputs | POS Inputs | Beschreibung |
|---|---|---|---|
t1: | Execute = 1 | Busy = 1 |
|
t2: |
| Accelerate = 0 |
|
t3: | Target position = 100000 | Warning = 1 |
|
t4: |
| Accelerate = 1 |
|
t5: |
| Accelerate = 0 |
|
t6: | Execute = 0 | Busy = 0 |
|
t7 - t10: |
|
|
|
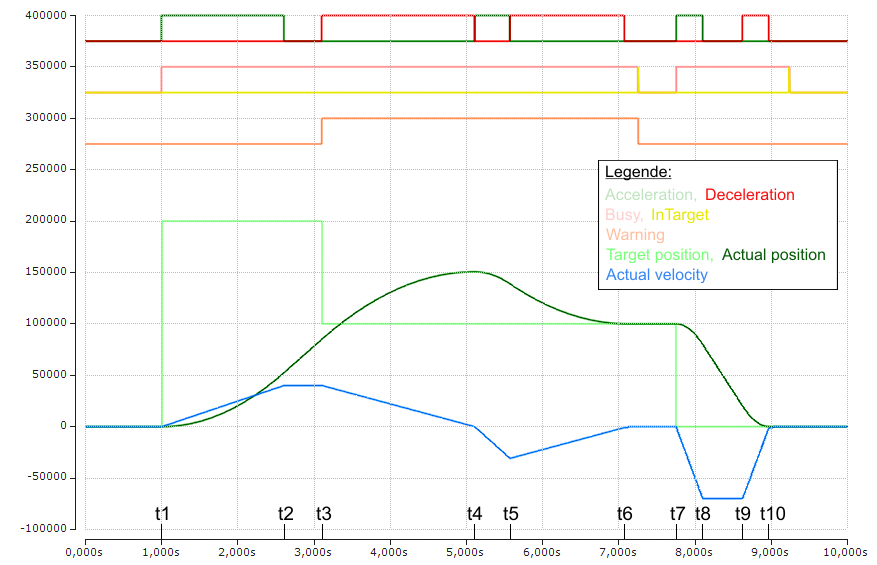 Abb.218: Scope-Aufnahme eines Fahrauftrages mit dynamischer Änderung der Zielposition, mit Überfahren der endgültigen Zielposition
Abb.218: Scope-Aufnahme eines Fahrauftrages mit dynamischer Änderung der Zielposition, mit Überfahren der endgültigen Zielposition(Die Achsen-Skalierung bezieht sich nur auf die Positionen, nicht auf die Geschwindigkeit und die Status-Bits)