Einstellungen in der NC
Auswahl der Bezugsgeschwindigkeit
Die Maximalgeschwindigkeit errechnet sich anhand der Grundfrequenz und der Motorfrequenz.
vmax = Grundfrequenz / Motorfrequenz = (2000 Fullsteps / s) / (200 Fullsteps / Umdrehung) = 10 Umdrehungen / s
Multipliziert man die Maximalgeschwindigkeit mit dem Weg pro Umdrehung, erhält man die Bezugsgeschwindigkeit.
vref = 10 Umdrehungen / s x 360° = 3600 °/ s
 Abb.170: Parameter Bezugsgeschwindigkeit
Abb.170: Parameter Bezugsgeschwindigkeit Totzeitkompensation
Die Totzeitkompensation der Achse kann in der Registerkarte Time Compensation der Encoder-Einstellungen Achse1_ENC eingestellt werden. Sie sollte theoretisch 3 Zyklen der NC-Zykluszeit betragen, besser haben sich jedoch 4 Zyklen der NC-Zykluszeit erwiesen. Dazu sollten die Parameter Time Compensation Mode Encoder auf ‚ON (with velocity)‘ und Encoder Delay in Cycles auf 4 eingestellt sein.
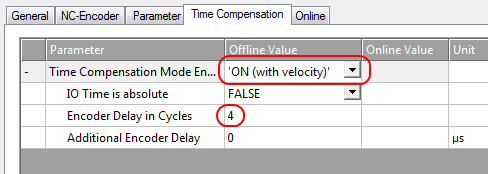 Abb.171: Parameter Totzeitkompensation
Abb.171: Parameter TotzeitkompensationSkalierungsfaktor
Den Skalierungsfaktor können Sie ändern, wenn Sie in der NC "Achse 1_Enc" und die Registerkarte "Parameter" auswählen (siehe Abb. Skalierungsfaktor einstellen). Der Wert lässt sich mit den unten angegebenen Formeln berechnen.
 Abb.172: Skalierungsfaktor einstellen
Abb.172: Skalierungsfaktor einstellenBerechnung des Skalierungsfaktors
mit Encoder, 4-fach Auswertung:
SF = Weg pro Umdrehung / (Inkremente x 4) = 360° / (1024 x 4) = 0,087890625 ° / INC
ohne Encoder:
SF = Weg pro Umdrehung / (Fullsteps x Microsteps) = 360° / (200 x 64) = 0,028125 ° / INC
Schleppüberwachung Position
Die Schleppabstandsüberwachung überwacht, ob der aktuelle Schleppabstand einer Achse einen Grenzwert überschreitet. Als Schleppabstand wird die Differenz zwischen ausgegebenem Sollwert (Stellgröße) und zurückgemeldetem Istwert bezeichnet. Sind die Parameter der Klemme noch unzureichend eingestellt, kann es dazu führen, dass beim Verfahren der Achse die Schleppabstandsüberwachung einen Fehler ausgibt. Bei der Inbetriebnahme kann es deswegen eventuell von Vorteil sein, wenn man die Grenzen der Schleppüberwachung Position etwas erhöht.
Hinweis | |
ACHTUNG: Beschädigung von Geräten, Maschinen und Peripherieteilen möglich! Bei der Parametrierung der Schleppüberwachung können durch Einstellen zu hoher Grenzwerte Geräte, Maschinen und Peripherieteile beschädigt werden! |
 Abb.173: Schleppüberwachung einstellen
Abb.173: Schleppüberwachung einstellenKv-Faktoren
In der NC lassen sich unter "Achse 1_Ctrl "in der Registerkarte "Parameter" zwei Proportionalfaktoren Kv einstellen. Wählen Sie jedoch vorher unter der Registerkarte "NC-Controller" den Typ Positionsregler mit zwei P-Konstanten (mit Ka) aus. Die beiden P-Konstanten sind einmal für den Bereich Stillstand und ein weiteres Mal für den Bereich Fahren (siehe Abb. Proportionalfaktor KV einstellen). Damit hat man die Möglichkeit, im Anfahrmoment und im Bremsmoment ein anderes Drehmoment einzustellen als beim Fahren. Der Schwellwert lässt sich direkt darunter (Pos-Regelung: Geschw.schwelle V dyn) zwischen 0.0 (0%) und 1.0 (100%) einstellen. In der Abb. Geschwindigkeitsrampe mit Grenzwerten des KV-Faktors ist eine Geschwindigkeitsrampe mit Schwellwerten von 30% dargestellt. Im Bereich Stillstand (t1 und t3) kann dann ein unterschiedlicher Kv-Faktor eingestellt werden als im Bereich Fahren (t2). In diesem Fall ist jeweils der gleiche Faktor verwendet worden, da bei Steppermotoren diese Funktion nicht so ausschlaggebend ist, wie bei DC-Motoren.
 Abb.174: Geschwindigkeitsrampe mit Grenzwerten des KV-Faktors
Abb.174: Geschwindigkeitsrampe mit Grenzwerten des KV-Faktors Abb.175: Proportionalfaktor KV einstellen
Abb.175: Proportionalfaktor KV einstellenTotzone für Positionsfehler
Mit Hilfe des Microstepping können 200 * 64 = 12800 Positionen angefahren werden. Da der Encoder nur 1024 * 4 = 4096 Positionen abfragen kann, wird unter Umständen eine Position, die sich zwischen zwei Abtastpunkten des Encoders befindet nicht richtig erfasst und die Klemme regelt um diese Position herum. Mit Hilfe der Totzone für Positionsfehler kann eine Toleranz angegeben werden, innerhalb der die Position als "erreicht" gesehen wird (Abb. Totzone für Positionsfehler).
 Abb.176: Totzone für Positionsfehler
Abb.176: Totzone für PositionsfehlerEinstellung der Hochlaufzeit
Um eventuell auftretende Resonanzen schnell zu durchfahren, sollten Hochlaufzeit und Bremszeit möglichst mit steilen Rampen gefahren werden.
 Abb.177: Einstellung der Hochlaufzeit im Reiter „Dynamik“
Abb.177: Einstellung der Hochlaufzeit im Reiter „Dynamik“Hinweis | |
ACHTUNG: Pufferkondensatorklemme (EL9570) bei kurzen Bremsrampen verwenden! Bei sehr kurzen Bremsrampen kann es zu einer kurzzeitigen erhöhten Rückspeisung kommen. In diesem Fall meldet die Klemme einen Fehler. Um dies zu verhindern sollte eine Pufferkondensatorklemme (EL9570) mit entsprechend ausgelegtem Ballastwiderstand (z. B. 10 Ohm) parallel zur Spannungsversorgung (50 V) des Motors geschaltet werden. Diese kann dann die zurück gespeiste Energie aufnehmen. |