Schleppfehlerüberwachung
In der Betriebsart CSP ist eine Schleppfehlerüberwachung verfügbar.
Voraussetzungen
Die Schleppfehlerüberwachung funktioniert nur, wenn ein Encoder angeschlossen ist. Der Parameter 0x8n10:64 „Commutation type“ muss auf einen Wert ungleich „Stepper with internal counter“ eingestellt sein.
Aktivieren
In der Werkseinstellung ist die Schleppfehlerüberwachung deaktiviert.
Wenn die oben genannten Voraussetzungen erfüllt sind, können Sie die Schleppfehlerüberwachung aktivieren, indem Sie den Parameter 0x8n10:50 „Following error window“ auf einen Wert ungleich dem Default-Wert 0xFFFF FFFF setzen.
Konfigurieren
Sie können die Schleppfehlerüberwachung mit den folgenden Parametern konfigurieren:
- 0x8n10:50 „Following error window“ ist der Betrag des maximal zulässigen Schleppfehlers in [Inc] (Encoder-Inkremente). Um diesen Wert in einen Winkel oder einen Weg umzurechnen, müssen Sie ihn mit dem Encoder-Skalierungsfaktor multiplizieren.
Wenn der Schleppfehler das „Following error window“ überschreitet, startet der „Following error time out“.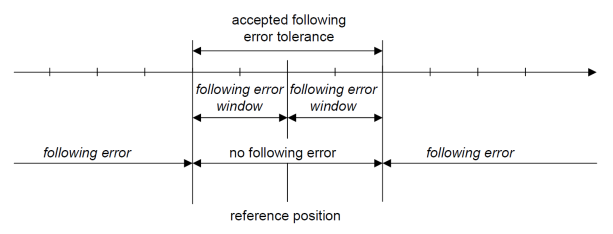
- 0x8n10:51 „Following error time out“ ist die maximal zulässige Zeitspanne in Millisekunden, die der Schleppfehler außerhalb des „Following error window“ liegen darf.
Wenn diese Zeitspanne überschritten wird, stoppt die Klemme den Motor und gibt einen Fehler aus.
Überwachen
Die Variable „Following error actual value“ im Prozessdatenobjekt „DRV Following error actual value Channel n“ enthält den aktuellen Schleppfehler.
Beispiel

In diesem Beispiel überschreitet der Schleppfehler zweimal das „Following error window“:
- Beim ersten Mal unterschreitet er es vor dem Ablaufen des „Following error time out“ wieder.
- Beim zweiten Mal wird auch der „Following error time out“ überschritten, z.B. durch einen blockierten Rotor. Die Klemme stoppt den Motor und gibt eine Fehlermeldung aus.