Distributed Clocks
 | DC-Support im EtherCAT Master Die DistributedClock-Unit der EL6695 verfügt über die DC system time, aber keine Sync/Latch-Unit. Die entsprechend Initialisierungsroutine wird von TwinCAT3 ab b4018.4, TwinCAT2 ab b2248 unterstützt. |
Die EL6695 Konfiguration ist unter dem Karteireiter ersichtlich und hat für den Datenaustausch die default Einstellung „keine Synchronisierung“ („FreeRun“).
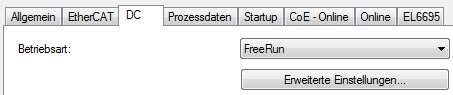 Abb.174: Distributed Clocks: keine Synchronisierung
Abb.174: Distributed Clocks: keine SynchronisierungDa die EL6695 zwei vollständige EtherCAT Slaves beinhaltet, sind grundsätzlich die beiden Distributed-Clock-Einheiten entsprechend unabhängig voneinander. Die EL6695 unterstützt zwei DC-Synchronisierungsmethoden:
- Sie kann wie die Vorgängerversion EL6692 der SyncSlave-Seite die Internal/External Timestamp Informationen zur Verfügung stellen und so dem dort gelagerten EtherCAT Master die Möglichkeit geben seine Echtzeit/EtherCAT Zyklus nachzuregeln. Es sind beide Regelungsrichtungen möglich.
- Anwendung unter TwinCAT: EL6695 auf DC-mode setzen damit sie von TwinCAT als Referenz Uhr verwendet werden kann
- Einen Timestamp-PDO einblenden und aktivieren (0x1A02 für 64 Bit oder 0x1A03 für 32 Bit). Dadurch erkennt TwinCAT, dass diese Klemme als externe Referenzuhr benutzt werden kann und liest die Zeitstempel ein.
- In den „EtherCAT DC master settings“ kann dann die externe Referenz Uhr ausgewählt werden:
 Abb.175: Distributed Clocks: Synchronisierung
Abb.175: Distributed Clocks: Synchronisierung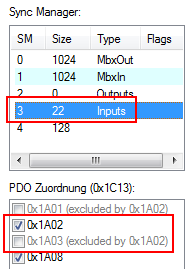 Abb.176: Timestamp-PDO 0x1A02 oder 0x1A03 einblenden
Abb.176: Timestamp-PDO 0x1A02 oder 0x1A03 einblenden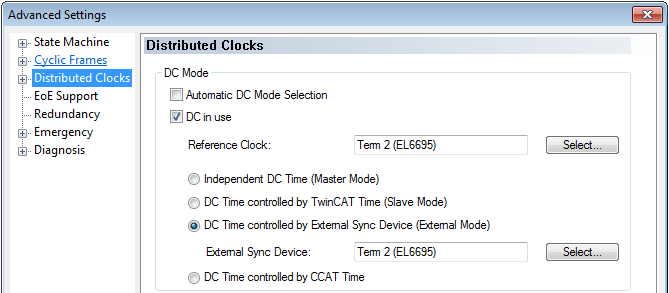 Abb.177: Distributed Clocks: Auswahl der externen Referenz Uhr (hier auf der Primärseite)
Abb.177: Distributed Clocks: Auswahl der externen Referenz Uhr (hier auf der Primärseite)Diese Einstellung ist lediglich auf der „SyncSlave“ –Seite vorzunehmen.
Auf der „SyncMaster“ – Seite ist beispielsweise eine EL3104 (DC-fähig) eingetragen:
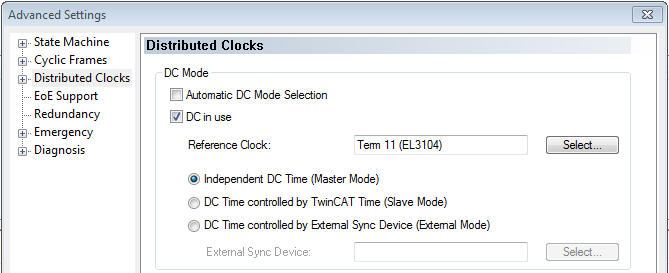 Abb.178: Distributed Clocks: Auswahl der EL3104 als „SyncMaster“ (hier auf der Sekundärseite)
Abb.178: Distributed Clocks: Auswahl der EL3104 als „SyncMaster“ (hier auf der Sekundärseite) - Wenn die EL6695 in beiden EtherCAT System der erste DC-fähige Slave ist, kann eine direkte DC-Kopplung der beiden Bridge-Seiten aktiviert werden ohne dass die EtherCAT Master darüber informiert werden müssen. Dann folgen beide EtherCAT-System/Master der EL6695-Zeit, ohne speziell konfiguriert zu werden. Es verbleibt allerdings ein Offset zwischen beiden Systemzeiten mit konstantem Wert.
- Beide EtherCAT Master setzen von Ihrer Seite aus 0x0920 DC system time offset. Die EL6695 akzeptiert dies jeweils und hält beide ESC in der EL6695 frequenzsynchron.
| Lokalregelungsverfahren nicht unterstützt Das in der EL6692 bekannte Lokalregelungsverfahren „ControlValue for DC MasterClock“ wird von der EL6695 nicht unterstützt. EtherCAT Master sollten das genannte Timestamp-Verfahren implementieren. |
Da die EL6695 die Zeitinformation der DistributedClock intern nicht benutzt sondern nur an die Gegenseite weiterleitet, ist technologisch eine Verwendung der besonderen DC-Register im ESC nicht nötig bzw. wird nicht unterstützt. Bei vielen EtherCAT Geräten mit DC-Unterstützung werden im Status-Übergang PreOP->SafeOP die DC-Register 0x09A0, 0x0990, 0x0980, 0x09A8 vom Master beschrieben. Die EL6695 verfügt nicht über diese Register weshalb ein Beschreibungsversuch beim Hochlauf zu Fehlermeldungen des EtherCAT Master führt, z.B. „Init Cmd failed: set DC cycle time“.
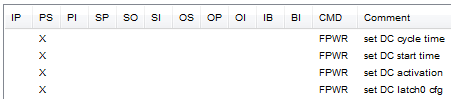 Abb.179: Distributed Clocks: Fehlermeldungen
Abb.179: Distributed Clocks: FehlermeldungenDer EtherCAT Master hat deshalb bei der EL6695 entweder diese Register nicht zu beschreiben oder er wertet den WcState des Beschreibungskommandos nicht aus. In der EL6695-ESI wird diese DC-Eigenschaft durch das Flag TimeLoopControlOnly = TRUE gekennzeichnet, das der EtherCAT Master beachten kann.