Distributed-Clock (DC) Einstellungen
 | EtherCAT und Distributed Clocks Auf der Beckhoff Website können Sie eine grundlegende Einführung in das Thema EtherCAT und Distributed Clocks herunterladen: die „EtherCAT Systembeschreibung“. |
Die Inkremental-Encoder-Klemmen unterstützen die Distributed-Clocks-Funktionalität (EL5101: ab Hardware 09 / Firmware 14; EL5151 ab Hardware 01 / Firmware 05). Damit die EL51xx den aktuellen Zählerstand rechtzeitig vor Ankunft des abfragenden EtherCAT‑Datagrams in den vorgesehenen Prozessdaten bereitstellen kann, muss ein entsprechendes Signal in der Klemme zyklisch generiert werden. Dieses Signal kann in der EL51xx durch zwei Ereignisse ausgelöst werden:
- Den SyncManager (SM)
- die Distributed Clock (DC).
In der Betriebsartenwahl (s. Abb. Karteireiter „DC“) stehen zur Auswahl:
 Abb.174: Karteireiter „DC“ (Distributed Clocks)
Abb.174: Karteireiter „DC“ (Distributed Clocks)- FreeRun/SM-Synchron
Das SyncManager-Ereignis tritt ein, wenn ein EtherCAT‑Frame Prozessdaten mit der EL51xx erfolgreich austauscht. Frame-getriggert wird so zyklisch der aktuelle Zählerstand ermittelt, allerdings mit dem geringen zeitlichen Jitter des Ethernet-Frames. Ein Ethernet‑Frame löst in dieser Betriebsart die Prozessdatenbereitstellung für den nächsten abholenden Frame aus. Das ist üblicherweise erst nach 1 x Zykluszeit der Fall. - DC-Synchron
In der Betriebsart DC wird die Zählerstandermittlung zyklisch konstant durch die integrierte DC-Einheit ausgelöst, standardmäßig im Gleichtakt mit dem Buszyklus aber mit einer konstanten Verschiebung (Phase, Shifttime, Offset). Durch die deutlich gleichmäßigere Abfrage (Synchronisationsgenauigkeit: 100 ns) kann z. B. ein übergeordneter Regelalgorithmus mit qualitativ höherwertigen Positionsdaten versorgt werden. In der EL51xx ist dieser Auslöser das SYNC0‑Signal, das in der Betriebsart „DC‑synchron“ wie eine Ausgangsbaugruppe eingestellt wird, s. „EtherCAT Systembeschreibung -> Distributed Clocks“
Die DC-Betriebsarten ermöglichen es, den Startzeitpunkt der Prozessdatenbereitstellung durch einen Offset-Wert (Shift-Wert) zu verschieben. Dieser Offset‑Wert kann nur beim EtherCAT‑Start gesetzt werden und ist dann während der Betriebszeit unveränderlich. Nach dem allgemeinen Distributed-Clocks-SYNC-Funktionsmodell kann das klemmenlokale SYNC‑Signal sinnvoll entweder kurz vor oder nach dem erwarten Frame‑Durchlaufzeitpunkt stattfinden: - Bei Eingangsklemmen wird das SYNC‑Signal vor dem Frame generiert, um aktuelle Eingangsdaten zum Weitertransport zur Verfügung zu stellen.
- Bei Ausgangsklemmen wird das SYNC‑Signal auf einen Zeitpunkt nach dem Framedurchlauf angesetzt, damit die eben angelieferten Ausgangsdaten sofort ausgegeben werden.
Da nur jeweils eine der beiden Betriebsarten möglich ist, kann der Benutzer hier die für seinen Anwendungsfall besser geeignete Betriebsart auswählen.
„DC Synchron“ entspricht hier der Konfiguration als Ausgangsbaugruppe, das lokale SYNC‑Event wird kurz nach der Passage des EtherCAT‑Frames ausgelöst.
- DC-Synchron (input based)
Im Modus „DC‑Synchron (input based)“ wird diese EL51xx der Gruppe der Eingangsbaugruppen zugeordnet und die Shift-Time (s. Abb. Erweiterte Einstellungen Distributed Clock (DC), Klemme EL51xx) entsprechend berechnet.
Beim Einschalten der Betriebsart „DC-Synchron“ werden Einstellungen von TwinCAT gewählt, die einen zuverlässigen Betrieb der EL51xx und die Gewinnung aktueller Positionsdaten gewährleisten. Das bedeutet, die Ermittlung des aktuellen Zählerstandes wird in hochkonstanten Abständen und in der Betriebsart „DC-synchron (input based)“ rechtzeitig - also mit genügend Sicherheitspuffer - vor dem abholenden EtherCAT‑Datagramm durch das SYNC0‑Signal gestartet.
| Dauer der Prozessdatenbereitstellung in der EL51x1 Die EL5101 (ab Hardware 09 / Firmware 14) bzw. EL5151 (ab Hardware 01 / Firmware 05) benötigt ca. 80 µs um nach dem SYNC‑Event die Positionsdaten zu ermitteln und zur Abholung bereitzustellen. Dieser Wert ist abhängig von der Konfiguration und Parametrierung. Unter Verwendung der internen DC‑Funktionen kann die aktuell real benötigte Dauer ausgelesen werden (siehe die CoE‑Einstellung in 0x1C32:08) und das Ergebnis wird in 0x1C32:05 geschrieben. |
Das SYNC0‑Signal kann bei Bedarf in entsprechenden Dialogen auf der Zeitachse nach rechts/spät bzw. links/früh durch Angabe einer „User defined Shift Time“ verschoben (geshiftet) werden, s. Abb. Erweiterte Einstellungen Distributed Clock (DC), Klemme EL51xx.
- Durch ein Shiften nach rechts (positiver Shift‑Wert) erfolgt die Abfrage des Zählerstandes später - damit wird der Positionswert aktueller, relativ gesehen von der SPS aus. Allerdings steigt damit das Risiko, dass die Positionsermittlung bis zur Ankunft des EtherCAT‑Frames nicht rechtzeitig beendet wurde und in diesem Zyklus ein aktueller Positionswert fehlt.
- Durch ein Shiften nach links (negativer Shift‑Wert) erfolgt die Abfrage des Zählerstandes früher - damit werden die Positionswerte älter, jedoch wird der Sicherheitspuffer vor Ankunft des EtherCAT‑Datagrams erhöht. Diese Einstellung kann auf Systemen mit hohem Echtzeit‑Jitter nützlich sein, wenn zur Steuerung z. B. kein Industrie PC von Beckhoff verwendet wird.
Hinweis | |
Achtung! Beschädigung der Geräte möglich! Die hier aufgeführten Hinweise und Erläuterungen sollten mit Bedacht angewendet werden! Die SYNC0- und SYNC1‑Einstellungen werden vom EtherCAT‑Master automatisch mit Werten belegt, die eine zuverlässige und aktuelle Prozessdatenerfassung unterstützen. Anwenderseitige Eingriffe an dieser Stelle können zu unerwünschtem Verhalten führen! Bei der Manipulation dieser Einstellungen im System Manager wird softwareseitig keine Plausibilitätskontrolle durchgeführt! Eine korrekte Funktion der Klemme in allen denkbaren Einstellungsvarianten kann nicht gewährleistet werden! |
Default-Einstellung
Das zyklische Lesen der Eingänge wird durch den SYNC0-Puls (Interrupt) der DC in der EL51xx ausgelöst. Standardmäßig wird die Einlese-Zykluszeit „Sync Unit Zyklus“ vom EtherCAT-Master auf die verwendete SPS-Zykluszeit und damit auf die EtherCAT-Zykluszeit gesetzt. Siehe Abb. Erweiterte Einstellungen Distributed Clock (DC), Klemme EL51xx.
4000 µs = 4 ms da sich TwinCAT hier im Config-Modus befindet.
DC-Einstellungen EL51xx
 Abb.175: Erweiterte Einstellungen Distributed Clock (DC), Klemme EL51xx
Abb.175: Erweiterte Einstellungen Distributed Clock (DC), Klemme EL51xx - SYNC0
Sync Unit Zyklus: Vielfaches der Buszykluszeit. In diesem Abstand (in µs) wird der Zählerstand periodisch ermittelt. - Anwenderdefiniert
Beliebige Zahl bis 232 ns ≈ 4,3 s Kommawerte sind möglich. - Shift Time
Mit der Shift Time kann der SYNC0-Puls dieser EL51xx gegenüber anderen Klemmen bzw. dem globalen SYNC-Puls in ns-Schritten verschoben werden. Sollen die Daten mehrerer EL51xx-Klemmen gleichzeitig gelesen werden, muss hier derselbe Wert eingetragen werden. - Based on Input Reference
Bei Aktivierung dieser Option wird zum klemmenlokalen konfigurierbaren SYNC0-Shift („User defined“) ein weiterer „Input Shift“ dazu addiert. Dieser Wert wird vom EtherCAT Master berechnet und zur Verfügung gestellt (SysMan/Gerät EtherCAT/Reiter EtherCAT/Erweiterte Einstellungen/Distributed Clocks/Input Shift Time/, siehe Abb. EtherCAT Master, Karteireiter EtherCAT, Erweiterte + EtherCAT Master, Erweiterte Einstellungen, Distributed Clock). Dadurch lesen alle Eingangsklemmen im System (EL1xxx, EL3xxx und entsprechend eingestellte ELxxxx wie die EL51xx) möglichst kurz vor dem abholenden EtherCAT-Frame ihre Eingänge ein und liefern so möglichst „aktuelle“ Eingangsdaten an die Steuerung ab. In der Betriebsart „input based“ wird dieser Wert automatisch berücksichtigt. - Enable SYNC0
Automatisch aktiviert in der Betriebsart „DC-synchron“. - SYNC1
Weiterer SYNC-Puls, abgeleitet aus SYNC0 oder der DC selbst. Wird bei der EL51xx nicht benötigt.
DC-Einstellungen EtherCAT Master
In den erweiterten Einstellungen des EtherCAT Master können übergeordnete Parameter der Distributed Clocks verändert werden. Siehe dazu auch die grundlegende Einführung in das Thema EtherCAT und Distributed Clocks herunterladen: die „EtherCAT Systembeschreibung -> Distributed Clocks“.
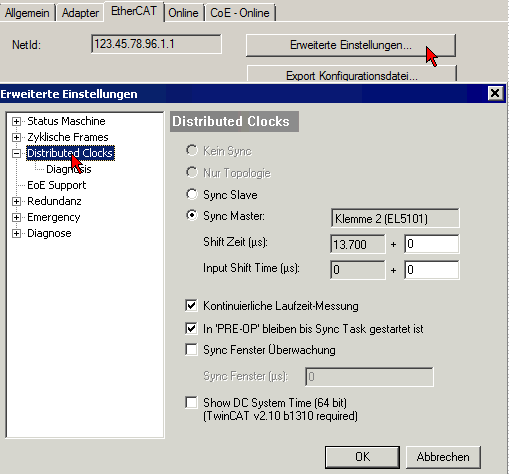 Abb.176: EtherCAT Master, Erweiterte Einstellungen, Distributed Clock
Abb.176: EtherCAT Master, Erweiterte Einstellungen, Distributed Clock