NC - Konfiguration (Motion)
 | Installation der neuesten XML-Device-Description Stellen Sie sicher, dass Sie die entsprechende aktuellste XML-Device-Description in TwinCAT installiert haben. Diese kann im Download-Bereich auf der Beckhoff Website heruntergeladen und entsprechend der Installationsanweisungen installiert werden. |
Nachfolgend wird die Achsen-Konfiguration und Verknüpfung im TwinCAT System Manager (Config mode) am Beispiel der EL5151 beschrieben. Gehen Sie bitte wie folgt vor:
Hinzufügen eines Motion-Elements
Klicken Sie mit der rechten Maustaste auf Motion
Wählen Sie im Pull-down Menü Neues Element hinzufügen… (Abb. Motion, Element hinzufügen).
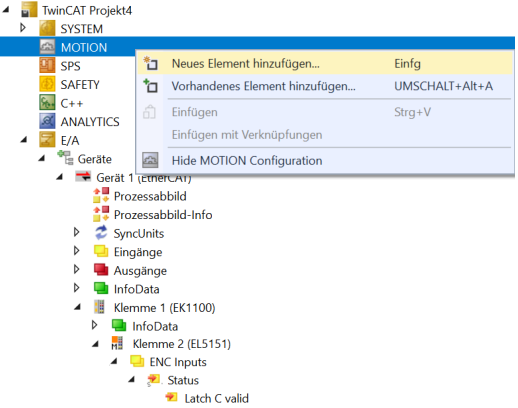 Abb.133: Motion, Element hinzufügen
Abb.133: Motion, Element hinzufügenWählen sie den Konfigurations-Typ NC/PTP NCI Configuration.
Bennen Sie die Task und bestätigen Sie mit OK (Abb. Typ auswählen, Task benennen und bestätigen)
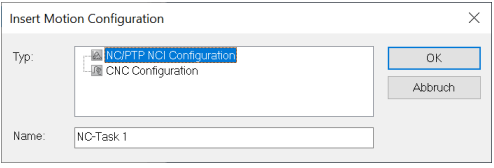 Abb.134: Typ auswählen, Task benennen und bestätigen
Abb.134: Typ auswählen, Task benennen und bestätigenEinfügen einer Achse
Klicken Sie mit der rechten Maustaste auf Achsen
Wählen Sie im Pull-down Menü Neues Element hinzufügen (Abb. Achse einfügen).
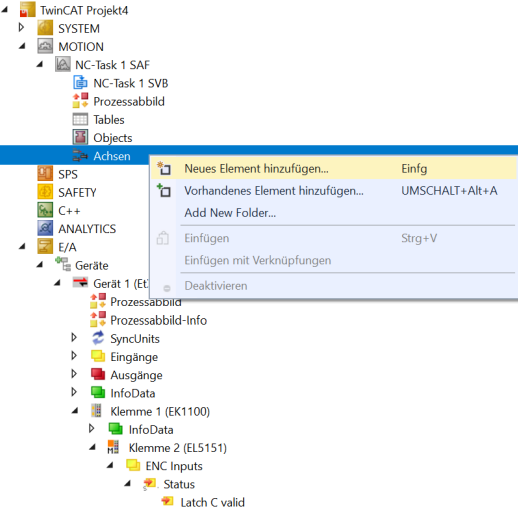 Abb.135: Achse einfügen
Abb.135: Achse einfügenWählen Sie einen Namen für die Axe
Wählen Sie den Typ Encoder Achse und bestätigen Sie mit OK (Abb. Achse benennen und Typ auswählen)
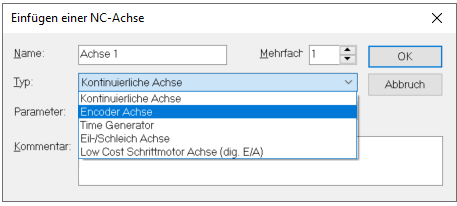 Abb.136: Achse benennen und Typ auswählen
Abb.136: Achse benennen und Typ auswählenVerknüpfung des Encoders
Nach der Anwahl des Karteireiters NC-Encoder wählen Sie im Pulldow-Menü Typ den Encoder an KL5101/Kl5111/IP5109/EL5101/EL5151/Profil MDP 511 (Abb. Auswahl des Encoders)
Klicken Sie den Button Verknüpft mit...
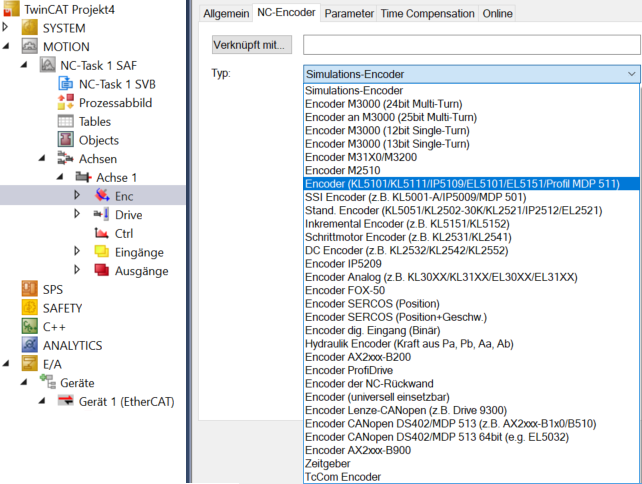 Abb.137: Auswahl des Encoders
Abb.137: Auswahl des EncodersWählen Sie die Klemme EL5151 und bestätigen Sie mit OK (Abb. Encoder-Klemme auswählen und bestätigen)
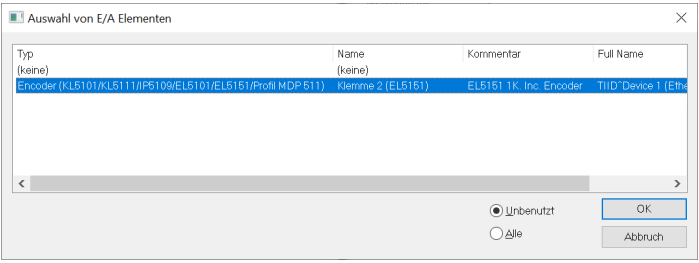 Abb.138: Encoder-Klemme auswählen und bestätigen
Abb.138: Encoder-Klemme auswählen und bestätigenAnzeige der verknüpften Ein- und Ausgänge
Die entsprechenden Eingänge und Ausgänge der EL5151 sind nun mit der NC-Task verknüpft (Abb. Verknüpfte Ein- und Ausgänge der EL5151 mit der NC-Task)
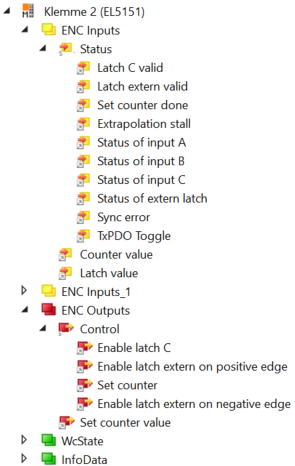 Abb.139: Verknüpfte Ein- und Ausgänge der EL5151 mit der NC-Task
Abb.139: Verknüpfte Ein- und Ausgänge der EL5151 mit der NC-Task