Betriebsart (Trigger Modus)
Trigger über den Kommunikationszyklus, Frame-getriggert:
- "FreeRun/SM-synchron"
Sobald eine EtherCAT-Kommunikation die EL5021 anspricht, startet sie eine neue Positionsermittlung. Die EtherCAT Kommunikation wird in der Regel durch die PLC/NC-Task gestartet.
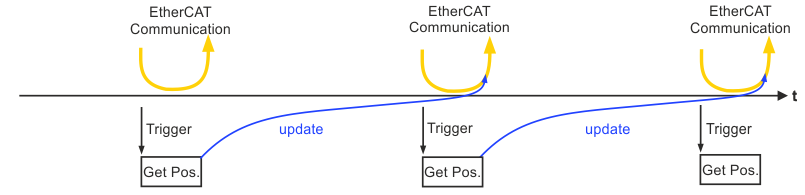 Abb.138: frame-getriggerte EtherCAT Kommunikation
Abb.138: frame-getriggerte EtherCAT KommunikationTrigger über die klemmeneigene Distributed Clock
- "DC-synchron (input based)"
Kurz vor dem nächsten abholenden EtherCAT Telegramm löst die DC-Einheit der Klemme die Positionsermittlung aus, so dass ein möglichst aktueller Positionswert zur Abholung bereitsteht. - "DC-synchron"
In der Einstellung "DC-synchron" wird die EL5021 in der DC-Gruppe der Ausgangsklemmen betrieben, wodurch sie nicht kurz vor einer EtherCAT-Kommunikation, sondern kurz nach der Kommunikation ihre Position ermittelt. Die Daten sind dadurch signifikant älter.
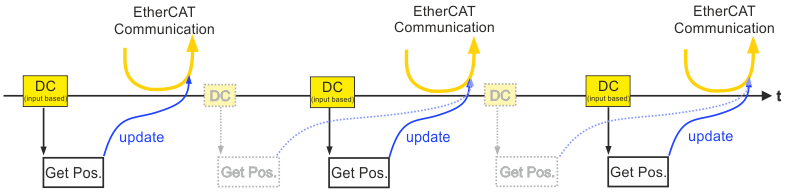
DC synchron (input based) getriggerte EtherCAT Kommunikation
Der exakte DC-Zeitpunkt der Positionsermittlung wird von der EL5021 nicht als Prozessdatum ausgegeben, sondern kann über die erweiterten Einstellungen der Klemme (s. Abb. Erweiterte Einstellungen im TwinCAT System Manager) oder über den EtherCAT Master --> Erweiterte Einstellungen -->MasterSetting --> IncludeDcTimeOffsets für alle Klemmen eingeblendet werden. Diese Werte werden bei Konfigurationserstellung/Aktivierung einmalig berechnet und ändern sich zur Laufzeit nicht mehr.
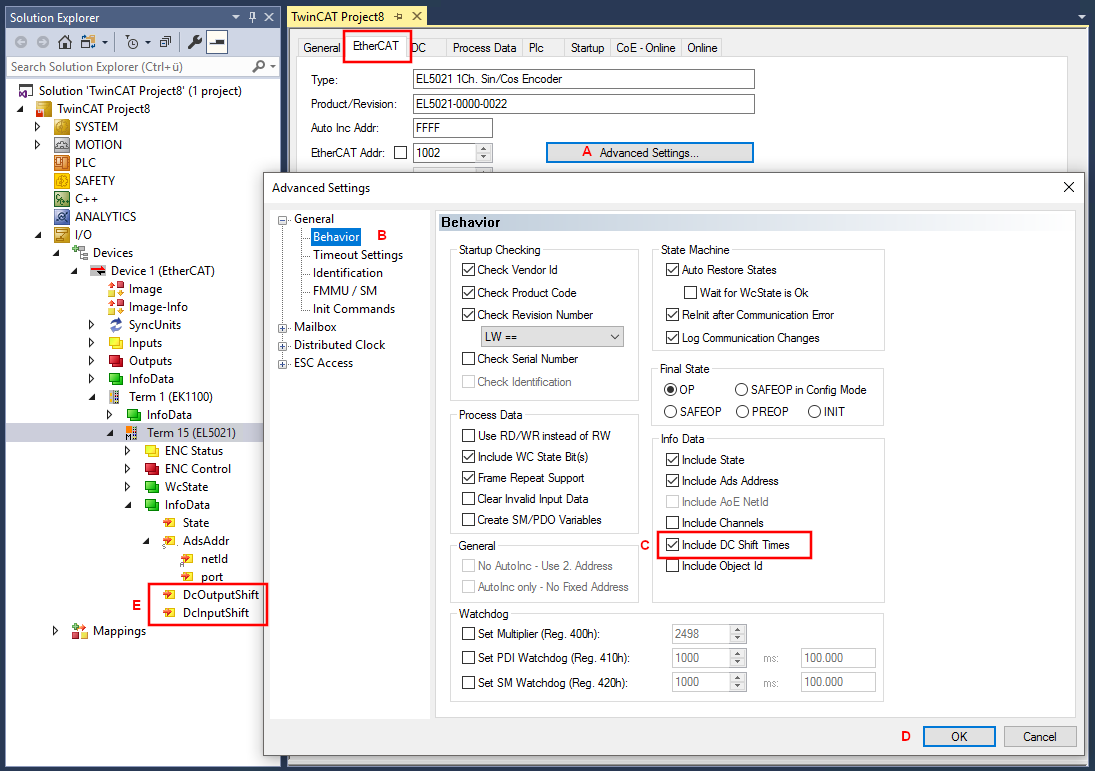 Abb.139: Erweiterte Einstellungen der Klemme im TwinCAT System Manager
Abb.139: Erweiterte Einstellungen der Klemme im TwinCAT System Manager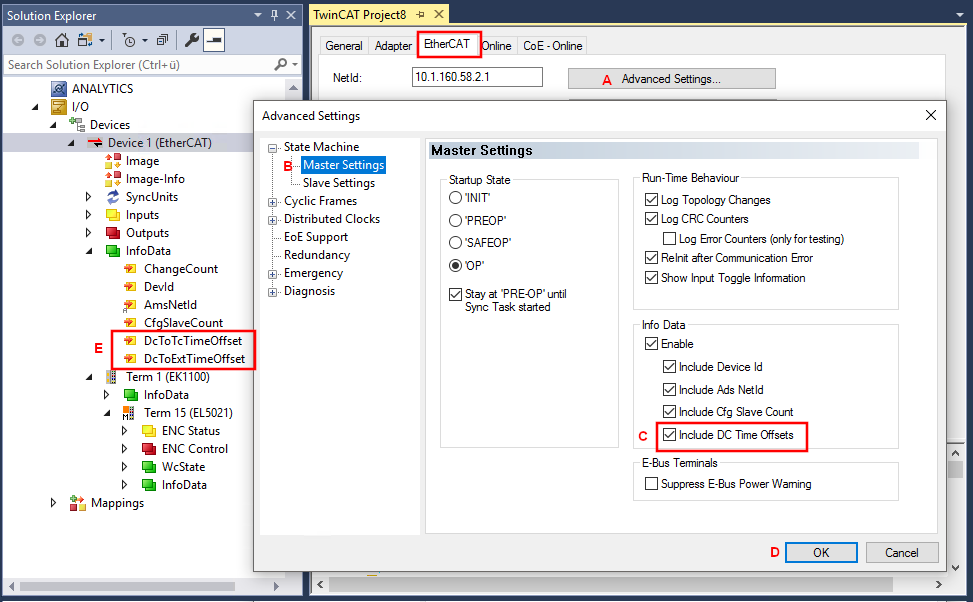 Abb.140: Erweiterte Einstellungen des EtherCAT-Masters im TwinCAT System Manager
Abb.140: Erweiterte Einstellungen des EtherCAT-Masters im TwinCAT System ManagerDie Ermittlung der aktuellen Position unterliegt einer konstanten Verzögerung von einigen µs. Diese Verzögerung wird in TwinCAT bereits bei der Berechnung der InputShiftTime berücksichtigt, so dass der tatsächliche Ermittlungszeitpunkt und die berechnete Zeit zusammenfallen.
Die minimal mögliche Abtastrate der EL5021 beträgt 80 µs und damit auch die minimal mögliche EtherCAT Zykluszeit.