Softwarefilter
Die EL3356 ist mit einem digitalen Software-Filter ausgestattet, das je nach Einstellung die Charakteristik eines Filter mit endlicher Impulsantwort (Finite Impulse Response filter, FIR-Filter) oder eines Filter mit unendlicher Impulsantwort (Infinite Impulse Response filter, IIR-Filter), annehmen kann. Der Filter ist per default als 50Hz-FIR aktiviert.
Im jeweiligen Messmodus kann der Filter aktiviert (0x8000:01, 0x8000:02) und parametriert (0x8000:11, 0x8000:12) werden (die EL3356-0000 unterstützt nur Modus 0).
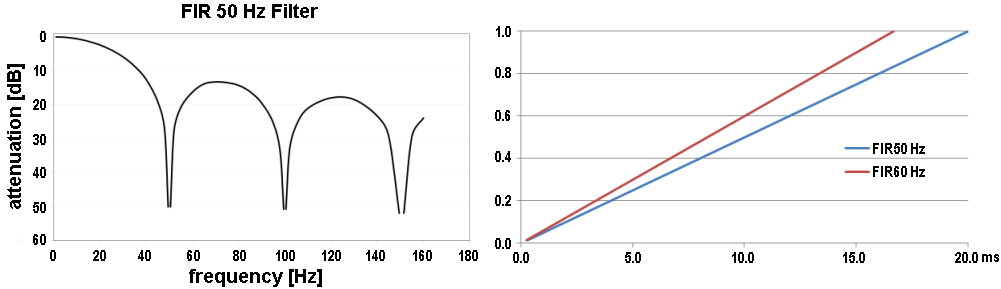
- FIR 50/60 Hz
Der Filter arbeitet als Notch-Filter (Kerbfilter) und bestimmt die Wandlungszeit der Klemme. Je höher die Filterfrequenz, desto schneller ist die Wandlungszeit. Es steht ein 50 Hz und ein 60 Hz Filter zur Verfügung.
Kerbfilter bedeutet, dass der Filter bei der genannten Filterfrequenz und Vielfachen davon Nullstellen (Kerben) im Frequenzgang hat, diese Frequenzen also in der Amplitude dämpft. Das FIR-Filter arbeitet als nicht-rekursives Filter. - PDO Filter (gültig ab Firmware 05)
- Der Filter verhält sich wie die oben beschriebenen 50/60Hz FIR Filter. Jedoch lässt sich hier die Filterfrequenz in 0,1 Hz Schritten durch ein Ausgangsdatenobjekt einstellen. Der Filterfrequenzbereich reicht von 0,1 Hz bis 200 Hz und kann im laufenden Betrieb umparametriert werden.
- Dazu muss das PDO 0x1601 („RMB Filter frequency“) in die Prozessdaten eingeblendet und im Objekt 0x8000:11 der Eintrag „PDO Filter frequency“ ausgewählt werden.
- Diese Funktion erlaubt der EL3356 Störungen einer bekannten Frequenz aus dem Messsignal zu unterdrücken. Ein typischer Anwendungsfall ist z. B. ein Silo, welches durch eine angetriebene Schnecke befüllt und gewogen wird. Die Drehzahl der Schnecke ist bekannt und kann als Frequenz in das Objekt übernommen werden. Somit können mechanische Schwingungen aus dem Messsignal entfernt werden.
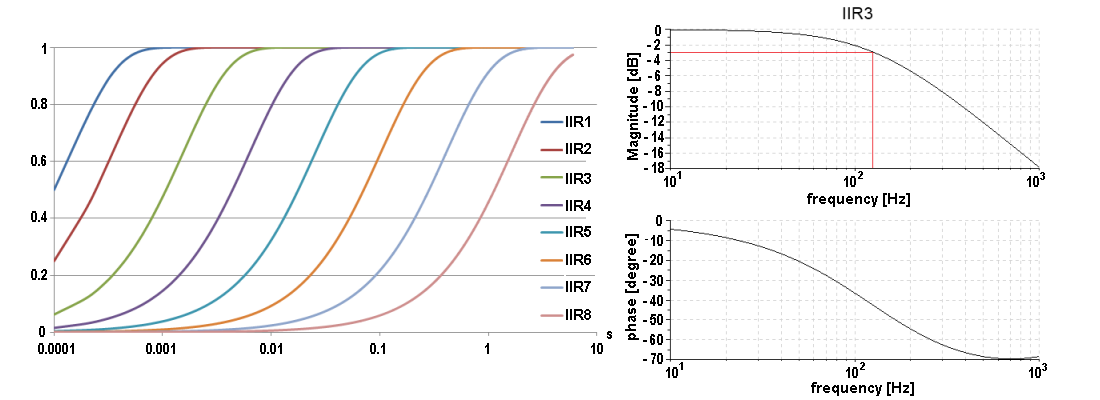
- IIR-Filter 1..8
Der Filter mit IIR-Charakteristik ist ein zeitdiskretes, lineares, zeitinvariantes Filter, welches in 8 Leveln eingestellt werden kann (Level 1 = schwaches rekursives Filter, bis Level 8 = starkes rekursives Filter).
Der IIR kann als gleitende Mittelwertberechnung nach einem Tiefpass verstanden werden.
Übersicht Wandlungszeiten
Filter Settings | Wert | PDO Updatezeit | Filtereigenschaft | Grenzfrequenz (-3 dB) [Hz] (typ.) | Kommentar | Anstiegszeit 10-90% [s] (typ.) | |
|---|---|---|---|---|---|---|---|
EL3356 | EL3356-0010, EL3356-0090 | ||||||
Filter deaktiviert | - | min. 10 ms | Zyklussynchron, EL3356-0010: EL3356-0090: | - | - | - | - |
0 | FIR 50 Hz | min. 10 ms | 312.5 µs | 50 Hz Notchfilter | 22 Hz | Wandlungszeit typ. 312.5 µs | 0.013 |
1 | FIR 60 Hz | min. 10 ms | 260.4 µs | 60 Hz Notchfilter | 25 Hz | Wandlungszeit typ. 260.4 µs | 0.016 |
2 | IIR1 | Zyklussynchron (bis min 10 ms Update) | Zyklussynchron (EL3356-0010: (EL3356-0090: | Tiefpass | 2000 Hz | a0 = 1/21 = 0.5 | 0.0003 |
3 | IIR2 | Tiefpass | 500 Hz | a0 = 1/22 = 0.25 | 0.0008 | ||
4 | IIR3 | Tiefpass | 125 Hz | a0 = 1/24 = 62.5e-3 | 0.0035 | ||
5 | IIR4 | Tiefpass | 30 Hz | a0 = 1/26 = 15.6e-3 | 0.014 | ||
6 | IIR5 | Tiefpass | 8 Hz | a0 = 1/28 = 3.91e-3 | 0.056 | ||
7 | IIR6 | Tiefpass | 2 Hz | a0 = 1/210 = 977e-6 | 0.225 | ||
8 | IIR7 | Tiefpass | 0.5 Hz | a0 = 1/212 = 244e-6 | 0.9 | ||
9 | IIR8 | Tiefpass | 0.1 Hz | a0 = 1/214 = 61.0e-6 | 3.6 | ||
10 | Dynamic IIR | Der Filter wechselt dynamisch zwischen den Filtern IIR1 bis IIR8 | |||||
11 | PDO Filter frequency | min. 10 ms |
| Notchfilter mit einstellbarer Frequenz | ca. 0,443 * PDO Value[Hz] | - | - |

 | Filter und Zykluszeit Bei eingeschalteten FIR Filtern (50 Hz oder 60 Hz) werden die Prozessdaten maximal mit der angegebenen Wandlungszeit aktualisiert. (siehe Tabelle) Die IIR Filter arbeiten zyklussynchron. Somit steht jeden SPS-Zyklus ein neuer Messwert zur Verfügung. |
| IIR Filter Differenzengleichung: Yn = Xn * a0 + Yn-1 * b1 |