Prozessdatenvorauswahl
Ein EtherCAT Gerät bietet üblicherweise mehrere verschiedene Prozessdatenobjekte (PDO) für Input- und Outputdaten an, die im System Manager konfiguriert d. h. zur zyklischen Übertragung aktiviert oder deaktiviert werden können. Die entsprechende Übersicht siehe weiter unten. Dabei ist auf Kompatibilität von In- und Output-PDO zu achten.
Ab TwinCAT 2.11 können bei den lt. ESI/XML-Beschreibung dafür vorgesehenen EtherCAT-Geräten die Prozessdaten für Input und Output gleichzeitig durch entsprechende vordefinierte Sätze aktiviert werden, „Predefined PDO“.
Die EL2596 verfügt im Tab „Prozessdaten“
 Abb.218: Reiter „Prozessdaten“
Abb.218: Reiter „Prozessdaten“über folgende „Predefined PDO“ Sätze:
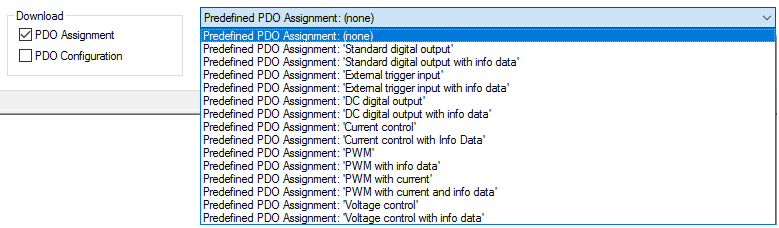 Abb.219: TwinCAT System Manager mit der PDO-Auswahl
Abb.219: TwinCAT System Manager mit der PDO-AuswahlIm Einzelnen setzen sich die Sätze wie folgt zusammen:
Betriebsart | Name | SM2, PDO-Zuordnung | SM3, PDO-Zuordnung |
|---|---|---|---|
Stromgeregelter Ausgang | Standard digital output (default Einstellung) | 0x1600 | 0x1A00 |
Standard digital output with info data | 0x1600 | 0x1A00 | |
External trigger input | 0x1600 | 0x1A00 | |
External trigger input with info data | 0x1600 | 0x1A00 | |
DC digital output | 0x1600 | 0x1A00 | |
DC digital output with info data | 0x1600 | 0x1A00 | |
Current Control | 0x1600 | 0x1A00 | |
Current Control with info data | 0x1600 | 0x1A00 | |
PWM with current | 0x1600 | 0x1A00 | |
PWM with current and info data | 0x1600 | 0x1A00 | |
Spannungsgeregelter Ausgang | Voltage control | 0x1600 | 0x1A00 |
Voltage control with info data | 0x1600 | 0x1A00 | |
PWM | 0x1600 | 0x1A00 | |
PWM with info data | 0x1600 | 0x1A00 |