Grundlagen
Die EL2595 verfügt beim DC-Betrieb über eine Besonderheit: üblicherweise wird die DC-Einheit im ESC (EtherCAT Slave Controller) vom EtherCAT-Master verwaltet. Bei der EL2595 verwaltet jedoch der lokale Controller die Startzeit und setzt entsprechende Werte im ESC.
 Abb.150: EL2595 DC-Schema
Abb.150: EL2595 DC-SchemaDer Controller (B) erhält Zeitstempel, Aktivierung und Sollzustände als normale Prozessdaten vom ESC (A). Er parametriert den ESC auf die nächste Startzeit. Beim angesetzten Zeitpunkt teilt dies der ESC dem Controller über das SYNC-Signal mit, dieser steuert dann entsprechend die Ausgangsstufen an.
Aus diesem Grund können im TwinCAT System Manager die entsprechenden DC-Einträge trotz DC-Modus nicht verändert werden, die EL2595 kann dennoch als ReferenceClock verwendet werden.
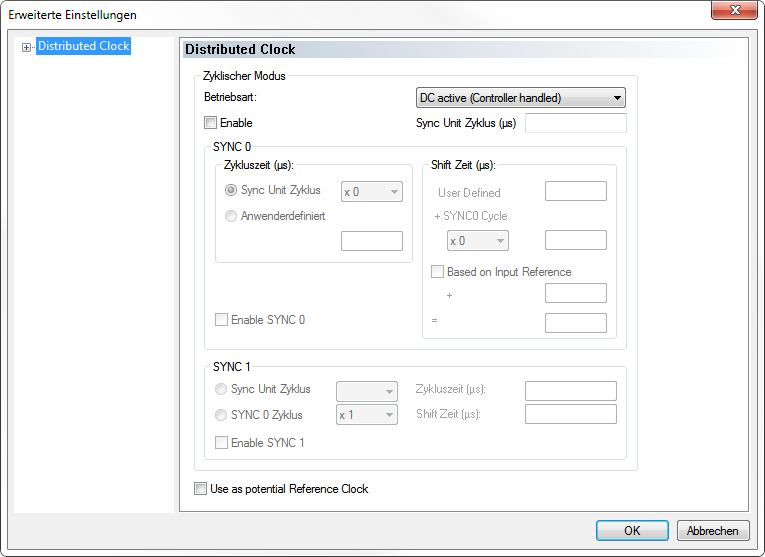 Abb.151: EL2595 DC-Einstellungen
Abb.151: EL2595 DC-Einstellungen