ONLINE Konfigurationserstellung
Erkennen/Scan des Geräts EtherCAT
Befindet sich das TwinCAT-System im CONFIG-Modus, kann online nach Geräten gesucht werden. Erkennbar ist dies durch ein Symbol unten rechts in der Informationsleiste:
- bei TwinCAT 2 durch eine blaue Anzeige „Config Mode“ im System Manager-Fenster:
 .
. - bei der Benutzeroberfläche der TwinCAT 3 Entwicklungsumgebung durch ein Symbol
 .
.
TwinCAT lässt sich in diesem Modus versetzen:
- TwinCAT 2: durch Auswahl von
 aus der Menüleiste oder über „Aktionen“ → „Starten/Restarten von TwinCAT in Konfig-Modus“
aus der Menüleiste oder über „Aktionen“ → „Starten/Restarten von TwinCAT in Konfig-Modus“ - TwinCAT 3: durch Auswahl von aus der Menüleiste oder über „TWINCAT“ → „Restart TwinCAT (Config Mode)“
 | Online Scannen im Config Mode Die Online-Suche im RUN-Modus (produktiver Betrieb) ist nicht möglich. Es ist die Unterscheidung zwischen TwinCAT-Programmiersystem und TwinCAT-Zielsystem zu beachten. |
Das TwinCAT 2-Icon () bzw. TwinCAT 3-Icon () in der Windows Taskleiste stellt immer den TwinCAT-Modus des lokalen IPC dar. Im System Manager-Fenster von TwinCAT 2 bzw. in der Benutzeroberfläche von TwinCAT 3 wird dagegen der TwinCAT-Zustand des Zielsystems angezeigt.

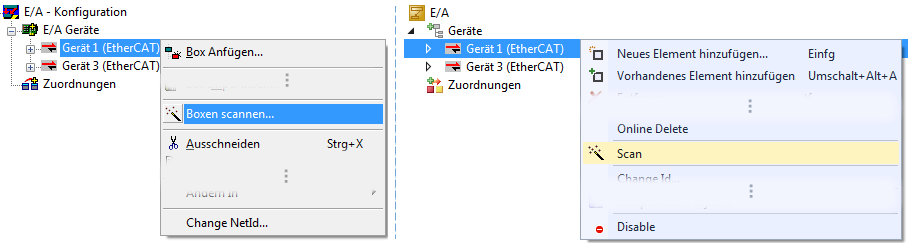
Im Konfigurationsbaum bringt uns ein Rechtsklick auf den General-Punkt „I/O Devices“ zum Such-Dialog.
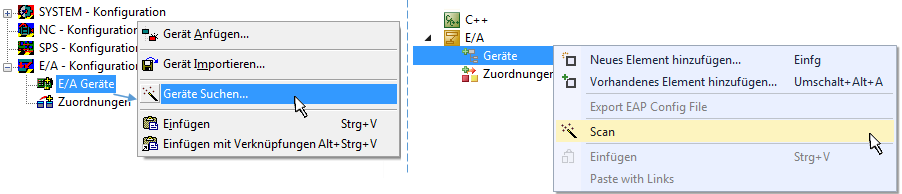
Dieser Scan-Modus versucht nicht nur EtherCAT-Geräte (bzw. die als solche nutzbaren Ethernet-Ports) zu finden, sondern auch NOVRAM, Feldbuskarten, SMB etc. Nicht alle Geräte können jedoch automatisch gefunden werden.

Ethernet Ports mit installierten TwinCAT Realtime-Treiber werden als „RT-Ethernet“ Geräte angezeigt. Testweise wird an diesen Ports ein EtherCAT-Frame verschickt. Erkennt der Scan-Agent an der Antwort, dass ein EtherCAT-Slave angeschlossen ist, wird der Port allerdings gleich als „EtherCAT Device“ angezeigt.
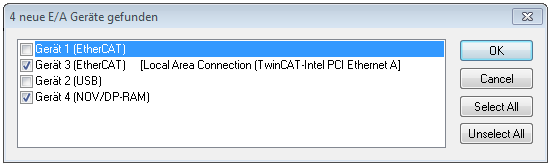
Über entsprechende Kontrollkästchen können Geräte ausgewählt werden (wie in der Abb. „Erkannte Ethernet-Geräte“ gezeigt ist z. B. Gerät 3 und Gerät 4 ausgewählt). Für alle angewählten Geräte wird nach Bestätigung „OK“ im nachfolgenden ein Teilnehmer-Scan vorgeschlagen, s. Abb. „Scan-Abfrage nach dem automatischen Anlegen eines EtherCAT Gerätes“.
| Auswahl Ethernet Port Es können nur Ethernet Ports für ein EtherCAT Gerät ausgewählt werden, für die der TwinCAT Realtime-Treiber installiert ist. Dies muss für jeden Port getrennt vorgenommen werden. Siehe dazu die entsprechende Installationsseite. |
Erkennen/Scan der EtherCAT Teilnehmer
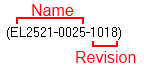
| Funktionsweise Online Scan Beim Scan fragt der Master die Identity Informationen der EtherCAT Slaves aus dem Slave-EEPROM ab. Es werden Name und Revision zur Typbestimmung herangezogen. Die entsprechenden Geräte werden dann in den hinterlegten ESI-Daten gesucht und in dem dort definierten Default-Zustand in den Konfigurationsbaum eingebaut. |
Die Scan-Funktion sollte mit Bedacht angewendet werden. Sie ist ein praktisches und schnelles Werkzeug, um für eine Inbetriebnahme eine Erst-Konfiguration als Arbeitsgrundlage zu erzeugen. Im Serienmaschinebau bzw. bei Reproduktion der Anlage sollte die Funktion aber nicht mehr zur Konfigurationserstellung verwendet werden sondern ggf. zum Vergleich mit der festgelegten Erst-Konfiguration.
Hintergrund: da Beckhoff aus Gründen der Produktpflege gelegentlich den Revisionsstand der ausgelieferten Produkte erhöht, kann durch einen solchen Scan eine Konfiguration erzeugt werden, die (bei identischem Maschinenaufbau) zwar von der Geräteliste her identisch ist, die jeweilige Geräterevision unterscheiden sich aber ggf. von der Erstkonfiguration.
Beispiel:
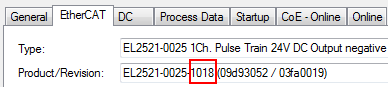
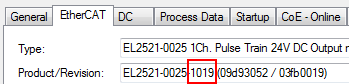
Firma A baut den Prototyp einer späteren Serienmaschine B. Dazu wird der Prototyp aufgebaut, in TwinCAT ein Scan über die IO-Geräte durchgeführt und somit die Erstkonfiguration "B.tsm" erstellt. An einer beliebigen Stelle sitzt dabei die EtherCAT-Klemme EL2521-0025 in der Revision 1018. Diese wird also so in die TwinCAT-Konfiguration eingebaut:
Ebenso werden in der Prototypentestphase Funktionen und Eigenschaften dieser Klemme durch die Programmierer/Inbetriebnehmer getestet und ggf. genutzt d. h. aus der PLC „B.pro“ oder der NC angesprochen. (sinngemäß gilt das gleiche für die TwinCAT 3-Solution-Dateien).
Nun wird die Prototypenentwicklung abgeschlossen und der Serienbau der Maschine B gestartet, Beckhoff liefert dazu weiterhin die EL2521-0025-0018. Falls die Inbetriebnehmer der Abteilung Serienmaschinenbau immer einen Scan durchführen, entsteht dabei bei jeder Maschine wieder ein eine inhaltsgleiche B-Konfiguration. Ebenso werden eventuell von A weltweit Ersatzteillager für die kommenden Serienmaschinen mit Klemmen EL2521-0025-1018 angelegt.
Nach einiger Zeit erweitert Beckhoff die EL2521-0025 um ein neues Feature C. Deshalb wird die FW geändert, nach außen hin kenntlich durch einen höheren FW-Stand und eine neue Revision -1019. Trotzdem unterstützt das neue Gerät natürlich Funktionen und Schnittstellen der Vorgängerversion(en), eine Anpassung von „B.tsm“ oder gar „B.pro“ ist somit nicht nötig. Die Serienmaschinen können weiterhin mit „B.tsm“ und „B.pro“ gebaut werden, zur Kontrolle der aufgebauten Maschine ist ein vergleichernder Scan gegen die Erstkonfiguration „B.tsm“ sinnvoll.
Wird nun allerdings in der Abteilung Seriennmaschinenbau nicht „B.tsm“ verwendet, sondern wieder ein Scan zur Erstellung der produktiven Konfiguration durchgeführt, wird automatisch die Revision -1019 erkannt und in die Konfiguration eingebaut:
Dies wird in der Regel von den Inbetriebnehmern nicht bemerkt. TwinCAT kann ebenfalls nichts melden, da ja quasi eine neue Konfiguration erstellt wird. Es führt nach der Kompatibilitätsregel allerdings dazu, dass in diese Maschine später keine EL2521-0025-1018 als Ersatzteil eingebaut werden sollen (auch wenn dies in den allermeisten Fällen dennoch funktioniert).
Dazu kommt, dass durch produktionsbegleitende Entwicklung in Firma A das neue Feature C der EL2521-0025-1019 (zum Beispiel ein verbesserter Analogfilter oder ein zusätzliches Prozessdatum zur Diagnose) gerne entdeckt und ohne betriebsinterne Rücksprache genutzt wird. Für die so entstandene neue Konfiguration „B2.tsm“ ist der bisherige Bestand an Ersatzteilgeräten nicht mehr zu verwenden.
Bei etabliertem Serienmaschinenbau sollte der Scan nur noch zu informativen Vergleichszwecken gegen eine definierte Erstkonfiguration durchgeführt werden. Änderungen sind mit Bedacht durchzuführen!
Wurde ein EtherCAT-Device in der Konfiguration angelegt (manuell oder durch Scan), kann das I/O-Feld nach Teilnehmern/Slaves gescannt werden.

Im System Manager (TwinCAT 2) bzw. der Benutzeroberfläche (TwinCAT 3) kann der Scan-Ablauf am Ladebalken unten in der Statusleiste verfolgt werden.

Die Konfiguration wird aufgebaut und kann danach gleich in den Online-Zustand (OPERATIONAL) versetzt werden.

Im Config/FreeRun-Mode wechselt die System Manager Anzeige blau/rot und das EtherCAT Gerät wird auch ohne aktive Task (NC, PLC) mit der Freilauf-Zykluszeit von 4 ms (Standardeinstellung) betrieben.


Das EtherCAT System sollte sich danach in einem funktionsfähigen zyklischen Betrieb nach Abb. Beispielhafte Online-Anzeige befinden.
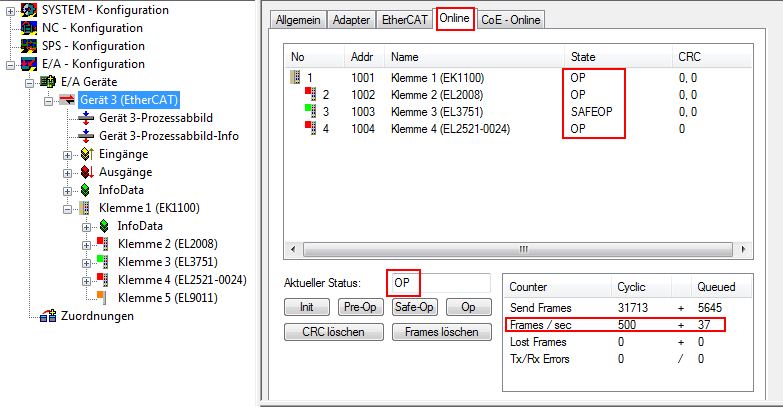
Zu beachten sind
- alle Slaves sollen im OP-State sein
- der EtherCAT Master soll im „Actual State“ OP sein
- „Frames/sec“ soll der Zykluszeit unter Berücksichtigung der versendeten Frameanzahl sein
- es sollen weder übermäßig „LostFrames“- noch CRC-Fehler auftreten
Die Konfiguration ist nun fertig gestellt. Sie kann auch wie im manuellen Vorgang beschrieben verändert werden.
Problembehandlung
Beim Scannen können verschiedene Effekte auftreten.
- es wird ein unbekanntes Gerät entdeckt, d. h. ein EtherCAT Slave für den keine ESI-XML-Beschreibung vorliegt.
In diesem Fall bietet der System Manager an, die im Gerät eventuell vorliegende ESI auszulesen. Lesen Sie dazu das Kapitel „Hinweise zu ESI/XML“. - Teilnehmer werden nicht richtig erkannt
Ursachen können sein - fehlerhafte Datenverbindungen, es treten Datenverluste während des Scans auf
- Slave hat ungültige Gerätebeschreibung
- Es sind die Verbindungen und Teilnehmer gezielt zu überprüfen, z. B. durch den Emergency Scan.
Der Scan ist dann erneut vorzunehmen.
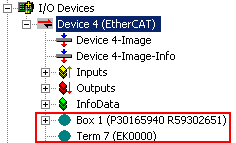
Im System Manager werden solche Geräte evtl. als EK0000 oder unbekannte Geräte angelegt. Ein Betrieb ist nicht möglich bzw. sinnvoll.
Scan über bestehender Konfiguration
Bei diesem Scan werden z. Z. (TwinCAT 2.11 bzw. 3.1) nur die Geräteeigenschaften Vendor (Hersteller), Gerätename und Revision verglichen! Ein „ChangeTo“ oder „Copy“ sollte nur im Hinblick auf die Beckhoff IO-Kompatibilitätsregel (s. o.) nur mit Bedacht vorgenommen werden. Das Gerät wird dann in der Konfiguration gegen die vorgefundene Revision ausgetauscht, dies kann Einfluss auf unterstützte Prozessdaten und Funktionen haben.
Wird der Scan bei bestehender Konfiguration angestoßen, kann die reale I/O-Umgebung genau der Konfiguration entsprechen oder differieren. So kann die Konfiguration verglichen werden.

Sind Unterschiede feststellbar, werden diese im Korrekturdialog angezeigt, die Konfiguration kann umgehend angepasst werden.
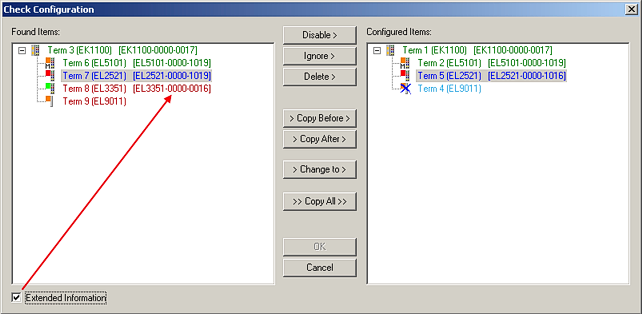
Die Anzeige der „Extended Information“ wird empfohlen, weil dadurch Unterschiede in der Revision sichtbar werden.
Farbe | Erläuterung |
|---|---|
grün | Dieser EtherCAT Slave findet seine Entsprechung auf der Gegenseite. Typ und Revision stimmen überein. |
blau | Dieser EtherCAT Slave ist auf der Gegenseite vorhanden, aber in einer anderen Revision. Diese andere Revision kann andere Default-Einstellungen der Prozessdaten und andere/zusätzliche Funktionen haben. Ist die gefundene Revision < als die konfigurierte Revision, ist der Einsatz vermutlich nicht möglich. Eventuell unterstützt das vorgefundene Gerät nicht alle Funktionen, die der Master von ihm aufgrund der höheren Revision erwartet. |
hellblau | Dieser EtherCAT Slave wird ignoriert (Button „Ignore“) |
rot |
|
| Geräte-Auswahl nach Revision, Kompatibilität Mit der ESI-Beschreibung wird auch das Prozessabbild, die Art der Kommunikation zwischen Master und Slave/Gerät und ggf. Geräte-Funktionen definiert. Damit muss das reale Gerät (Firmware wenn vorhanden) die Kommunikationsanfragen/-einstellungen des Masters unterstützen. Dies ist abwärtskompatibel der Fall, d. h. neuere Geräte (höhere Revision) sollen es auch unterstützen, wenn der EtherCAT Master sie als eine ältere Revision anspricht. Als Beckhoff-Kompatibilitätsregel für EtherCAT-Klemmen/ Boxen/ EJ-Module ist anzunehmen: |
Beispiel
In der Konfiguration wird eine EL2521-0025-1018 vorgesehen, dann kann real eine EL2521-0025-1018 oder höher (-1019, -1020) eingesetzt werden.
Wenn im TwinCAT System aktuelle ESI-Beschreibungen vorliegen, entspricht der im Auswahldialog als letzte Revision angebotene Stand dem Produktionsstand von Beckhoff. Es wird empfohlen, bei Erstellung einer neuen Konfiguration jeweils diesen letzten Revisionsstand eines Gerätes zu verwenden, wenn aktuell produzierte Beckhoff-Geräte in der realen Applikation verwendet werden. Nur wenn ältere Geräte aus Lagerbeständen in der Applikation verbaut werden sollen, ist es sinnvoll eine ältere Revision einzubinden.
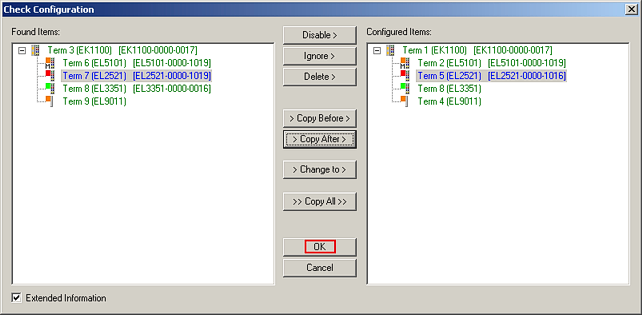
Sind alle Änderungen übernommen oder akzeptiert, können sie durch „OK“ in die reale *.tsm-Konfiguration übernommen werden.
Change to Compatible Type
TwinCAT bietet mit „Change to Compatible Type…“ eine Funktion zum Austauschen eines Gerätes unter Beibehaltung der Links in die Task.
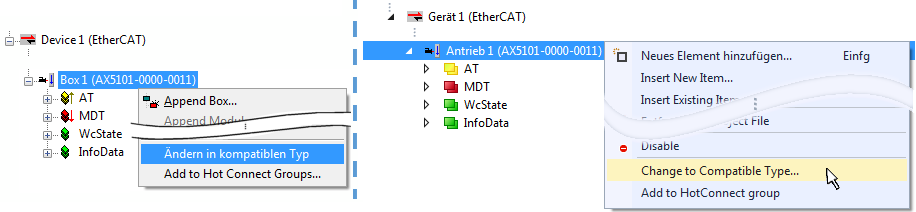
Diese Funktion ist vorzugsweise auf die AX5000-Geräte anzuwenden.
Change to Alternative Type
Der TwinCAT System Manager bietet eine Funktion zum Austauschen eines Gerätes: Change to Alternative Type
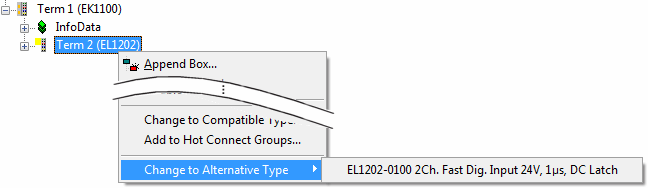
Wenn aufgerufen, sucht der System Manager in der bezogenen Geräte-ESI (hier im Beispiel: EL1202-0000) nach dort enthaltenen Angaben zu kompatiblen Geräten. Die Konfiguration wird geändert und gleichzeitig das ESI-EEPROM überschrieben - deshalb ist dieser Vorgang nur im Online-Zustand (ConfigMode) möglich.