EtherCAT Teilnehmerkonfiguration
Klicken Sie im linken Fenster des TwinCAT 2 System Managers bzw. bei der TwinCAT 3 Entwicklungsumgebung im Projektmappen-Explorer auf das Element der Klemme im Baum, die Sie konfigurieren möchten (im Beispiel: Klemme 3: EL3751).

Im rechten Fenster des System Managers (TwinCAT 2) bzw. der Entwicklungsumgebung (TwinCAT 3) stehen Ihnen nun verschiedene Karteireiter zur Konfiguration der Klemme zur Verfügung. Dabei bestimmt das Maß der Komplexität eines Teilnehmers welche Karteireiter zur Verfügung stehen. So bietet, wie im obigen Beispiel zu sehen, die Klemme EL3751 viele Einstellmöglichkeiten und stellt eine entsprechende Anzahl von Karteireitern zur Verfügung. Im Gegensatz dazu stehen z. B. bei der Klemme EL1004 lediglich die Karteireiter „Allgemein“, „EtherCAT“, „Prozessdaten“ und „Online“ zur Auswahl. Einige Klemmen, wie etwa die EL6695 bieten spezielle Funktionen über einen Karteireiter mit der eigenen Klemmenbezeichnung an, also „EL6695“ in diesem Fall. Ebenfalls wird ein spezieller Karteireiter „Settings“ von Klemmen mit umfangreichen Einstellmöglichkeiten angeboten (z. B. EL3751).
Karteireiter „Allgemein“
Name | Name des EtherCAT-Geräts |
Id | Laufende Nr. des EtherCAT-Geräts |
Typ | Typ des EtherCAT-Geräts |
Kommentar | Hier können Sie einen Kommentar (z. B. zum Anlagenteil) hinzufügen. |
Disabled | Hier können Sie das EtherCAT-Gerät deaktivieren. |
Symbole erzeugen | Nur wenn dieses Kontrollkästchen aktiviert ist, können Sie per ADS auf diesen EtherCAT-Slave zugreifen. |
Karteireiter „EtherCAT“
Typ | Typ des EtherCAT-Geräts |
Product/Revision | Produkt- und Revisions-Nummer des EtherCAT-Geräts |
Auto Inc Adr. | Auto-Inkrement-Adresse des EtherCAT-Geräts. Die Auto-Inkrement-Adresse kann benutzt werden, um jedes EtherCAT-Gerät anhand seiner physikalischen Position im Kommunikationsring zu adressieren. Die Auto-Inkrement-Adressierung wird während der Start-Up-Phase benutzt, wenn der EtherCAT-master die Adressen an die EtherCAT-Geräte vergibt. Bei der Auto-Inkrement-Adressierung hat der erste EtherCAT-Slave im Ring die Adresse 0000hex und für jeden weiteren Folgenden wird die Adresse um 1 verringert (FFFFhex, FFFEhex usw.). |
EtherCAT Adr. | Feste Adresse eines EtherCAT-Slaves. Diese Adresse wird vom EtherCAT-Master während der Start-Up-Phase vergeben. Um den Default-Wert zu ändern, müssen Sie zuvor das Kontrollkästchen links von dem Eingabefeld markieren. |
Vorgänger Port | Name und Port des EtherCAT-Geräts, an den dieses Gerät angeschlossen ist. Falls es möglich ist, dieses Gerät mit einem anderen zu verbinden, ohne die Reihenfolge der EtherCAT-Geräte im Kommunikationsring zu ändern, dann ist dieses Kombinationsfeld aktiviert und Sie können das EtherCAT-Gerät auswählen, mit dem dieses Gerät verbunden werden soll. |
Weitere Einstellungen | Diese Schaltfläche öffnet die Dialoge für die erweiterten Einstellungen. |
Der Link am unteren Rand des Karteireiters führt Sie im Internet auf die Produktseite dieses EtherCAT-Geräts.
Karteireiter „Prozessdaten“
Zeigt die (Allgemeine Slave PDO-) Konfiguration der Prozessdaten an. Die Eingangs- und Ausgangsdaten des EtherCAT-Slaves werden als CANopen Prozess-Daten-Objekte (Process Data Objects, PDO) dargestellt. Falls der EtherCAT-Slave es unterstützt, ermöglicht dieser Dialog dem Anwender ein PDO über PDO-Zuordnung auszuwählen und den Inhalt des individuellen PDOs zu variieren.
Die von einem EtherCAT Slave zyklisch übertragenen Prozessdaten (PDOs) sind die Nutzdaten, die in der Applikation zyklusaktuell erwartet werden oder die an den Slave gesendet werden. Dazu parametriert der EtherCAT Master (Beckhoff TwinCAT) jeden EtherCAT Slave während der Hochlaufphase, um festzulegen, welche Prozessdaten (Größe in Bit/Bytes, Quellort, Übertragungsart) er von oder zu diesem Slave übermitteln möchte. Eine falsche Konfiguration kann einen erfolgreichen Start des Slaves verhindern.
Für Beckhoff EtherCAT Slaves EL, ES, EM, EJ und EP gilt im Allgemeinen:
- Die vom Gerät unterstützten Prozessdaten Input/Output sind in der ESI/XML-Beschreibung herstellerseitig definiert. Der TwinCAT EtherCAT Master verwendet die ESI-Beschreibung zur richtigen Konfiguration des Slaves.
- Wenn vorgesehen, können die Prozessdaten im System Manager verändert werden. Siehe dazu die Gerätedokumentation.
Solche Veränderungen können sein: Ausblenden eines Kanals, Anzeige von zusätzlichen zyklischen Informationen, Anzeige in 16 Bit statt in 8 Bit Datenumfang usw. - Die Prozessdateninformationen liegen bei so genannten „intelligenten“ EtherCAT-Geräten ebenfalls im CoE-Verzeichnis vor. Beliebige Veränderungen in diesem CoE-Verzeichnis, die zu abweichenden PDO-Einstellungen führen, verhindern jedoch das erfolgreiche Hochlaufen des Slaves. Es wird davon abgeraten, andere als die vorgesehene Prozessdaten zu konfigurieren, denn die Geräte-Firmware (wenn vorhanden) ist auf diese PDO-Kombinationen abgestimmt.
Ist laut Gerätedokumentation eine Veränderung der Prozessdaten zulässig, kann dies wie folgt vorgenommen werden, s. Abb. Konfigurieren der Prozessdaten.
- A: Wählen Sie das zu konfigurierende Gerät
- B: Wählen Sie im Reiter „Process Data“ den Input- oder Output-Syncmanager (C)
- D: die PDOs können an- bzw. abgewählt werden
- H: die neuen Prozessdaten sind als link-fähige Variablen im System Manager sichtbar
Nach einem Aktivieren der Konfiguration und TwinCAT-Neustart (bzw. Neustart des EtherCAT Masters) sind die neuen Prozessdaten aktiv. - E: wenn ein Slave dies unterstützt, können auch Input- und Output-PDO gleichzeitig durch Anwahl eines so genannten PDO-Satzes („Predefined PDO-settings“) verändert werden.
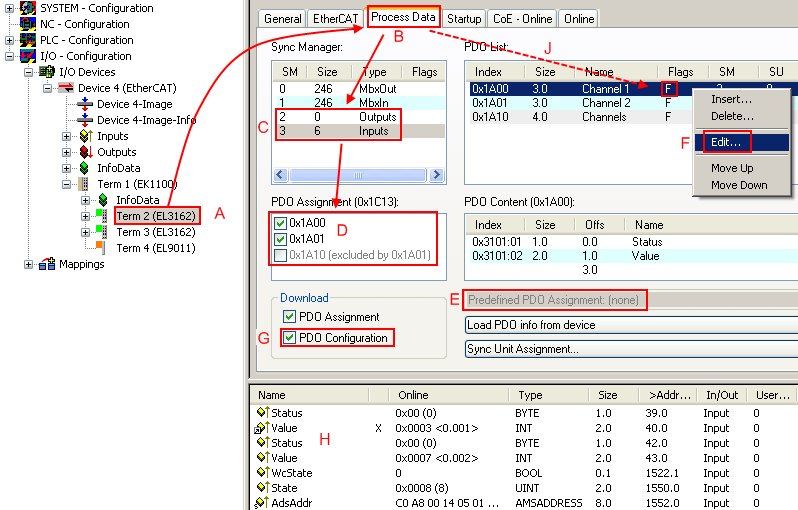
 | Manuelle Veränderung der Prozessdaten In der PDO-Übersicht kann laut ESI-Beschreibung ein PDO als „fixed“ mit dem Flag „F“ gekennzeichnet sein (Abb. Konfigurieren der Prozessdaten, J). Solche PDOs können prinzipiell nicht in ihrer Zusammenstellung verändert werden, auch wenn TwinCAT den entsprechenden Dialog anbietet („Edit“). Insbesondere können keine beliebigen CoE-Inhalte als zyklische Prozessdaten eingeblendet werden. Dies gilt im Allgemeinen auch für den Fall, dass ein Gerät den Download der PDO Konfiguration „G“ unterstützt. Bei falscher Konfiguration verweigert der EtherCAT Slave üblicherweise den Start und Wechsel in den OP-State. Eine Logger-Meldung wegen „invalid SM cfg“ wird im System Manager ausgegeben: Diese Fehlermeldung „invalid SM IN cfg“ oder „invalid SM OUT cfg“ bietet gleich einen Hinweis auf die Ursache des fehlgeschlagenen Starts. |
Eine detaillierte Beschreibung befindet sich am Ende dieses Kapitels.
Karteireiter „Startup“
Der Karteireiter Startup wird angezeigt, wenn der EtherCAT-Slave eine Mailbox hat und das Protokoll CANopen over EtherCAT (CoE) oder das Protokoll Servo drive over EtherCAT unterstützt. Mit Hilfe dieses Karteireiters können Sie betrachten, welche Download-Requests während des Startups zur Mailbox gesendet werden. Es ist auch möglich neue Mailbox-Requests zur Listenanzeige hinzuzufügen. Die Download-Requests werden in derselben Reihenfolge zum Slave gesendet, wie sie in der Liste angezeigt werden.
Spalte | Beschreibung |
|---|---|
Transition | Übergang, in den der Request gesendet wird. Dies kann entweder
Wenn der Übergang in „<>“ eingeschlossen ist (z. B. <PS>), dann ist der Mailbox Request fest und kann vom Anwender nicht geändert oder gelöscht werden. |
Protokoll | Art des Mailbox-Protokolls |
Index | Index des Objekts |
Data | Datum, das zu diesem Objekt heruntergeladen werden soll. |
Kommentar | Beschreibung des zu der Mailbox zu sendenden Requests |
Move Up | Diese Schaltfläche bewegt den markierten Request in der Liste um eine Position nach oben. |
Move Down | Diese Schaltfläche bewegt den markierten Request in der Liste um eine Position nach unten. |
New | Diese Schaltfläche fügt einen neuen Mailbox-Download-Request, der währen des Startups gesendet werden soll hinzu. |
Delete | Diese Schaltfläche löscht den markierten Eintrag. |
Edit | Diese Schaltfläche editiert einen existierenden Request. |
Karteireiter „CoE - Online“
Wenn der EtherCAT-Slave das Protokoll CANopen over EtherCAT (CoE) unterstützt, wird der zusätzliche Karteireiter CoE - Online angezeigt. Dieser Dialog listet den Inhalt des Objektverzeichnisses des Slaves auf (SDO-Upload) und erlaubt dem Anwender den Inhalt eines Objekts dieses Verzeichnisses zu ändern. Details zu den Objekten der einzelnen EtherCAT-Geräte finden Sie in den gerätespezifischen Objektbeschreibungen.
Darstellung der Objekt-Liste
Spalte | Beschreibung | |
|---|---|---|
Index | Index und Subindex des Objekts | |
Name | Name des Objekts | |
Flags | RW | Das Objekt kann ausgelesen und Daten können in das Objekt geschrieben werden (Read/Write) |
RO | Das Objekt kann ausgelesen werden, es ist aber nicht möglich Daten in das Objekt zu schreiben (Read only) | |
P | Ein zusätzliches P kennzeichnet das Objekt als Prozessdatenobjekt. | |
Wert | Wert des Objekts | |
Update List | Die Schaltfläche Update List aktualisiert alle Objekte in der Listenanzeige |
Auto Update | Wenn dieses Kontrollkästchen angewählt ist, wird der Inhalt der Objekte automatisch aktualisiert. |
Advanced | Die Schaltfläche Advanced öffnet den Dialog Advanced Settings. Hier können Sie festlegen, welche Objekte in der Liste angezeigt werden. |
Online - über SDO-Information | Wenn dieses Optionsfeld angewählt ist, wird die Liste der im Objektverzeichnis des Slaves enthaltenen Objekte über SDO-Information aus dem Slave hochgeladen. In der untenstehenden Liste können Sie festlegen welche Objekt-Typen hochgeladen werden sollen. |
Offline - über EDS-Datei | Wenn dieses Optionsfeld angewählt ist, wird die Liste der im Objektverzeichnis enthaltenen Objekte aus einer EDS-Datei gelesen, die der Anwender bereitstellt. |
Karteireiter „Online“
Status Maschine
Init | Diese Schaltfläche versucht das EtherCAT-Gerät auf den Status Init zu setzen. |
Pre-Op | Diese Schaltfläche versucht das EtherCAT-Gerät auf den Status Pre-Operational zu setzen. |
Op | Diese Schaltfläche versucht das EtherCAT-Gerät auf den Status Operational zu setzen. |
Bootstrap | Diese Schaltfläche versucht das EtherCAT-Gerät auf den Status Bootstrap zu setzen. |
Safe-Op | Diese Schaltfläche versucht das EtherCAT-Gerät auf den Status Safe-Operational zu setzen. |
Fehler löschen | Diese Schaltfläche versucht die Fehleranzeige zu löschen. Wenn ein EtherCAT-Slave beim Statuswechsel versagt, setzt er eine Fehler-Flag. Beispiel: ein EtherCAT-Slave ist im Zustand PREOP (Pre-Operational). Nun fordert der Master den Zustand SAFEOP (Safe-Operational) an. Wenn der Slave nun beim Zustandswechsel versagt, setzt er das Fehler-Flag. Der aktuelle Zustand wird nun als ERR PREOP angezeigt. Nach Drücken der Schaltfläche Fehler löschen ist das Fehler-Flag gelöscht und der aktuelle Zustand wird wieder als PREOP angezeigt. |
Aktueller Status | Zeigt den aktuellen Status des EtherCAT-Geräts an. |
Angeforderter Status | Zeigt den für das EtherCAT-Gerät angeforderten Status an. |
DLL-Status
Zeigt den DLL-Status (Data-Link-Layer-Status) der einzelnen Ports des EtherCAT-Slaves an. Der DLL-Status kann vier verschiedene Zustände annehmen:
Status | Beschreibung |
|---|---|
No Carrier / Open | Kein Carrier-Signal am Port vorhanden, der Port ist aber offen. |
No Carrier / Closed | Kein Carrier-Signal am Port vorhanden und der Port ist geschlossen. |
Carrier / Open | Carrier-Signal ist am Port vorhanden und der Port ist offen. |
Carrier / Closed | Carrier-Signal ist am Port vorhanden, der Port ist aber geschlossen. |
File Access over EtherCAT
Download | Mit dieser Schaltfläche können Sie eine Datei zum EtherCAT-Gerät schreiben. |
Upload | Mit dieser Schaltfläche können Sie eine Datei vom EtherCAT-Gerät lesen. |
Karteireiter „DC“ (Distributed Clocks)
Betriebsart | Auswahlmöglichkeiten (optional):
|
Erweiterte Einstellungen… | Erweiterte Einstellungen für die Nachregelung der echtzeitbestimmende TwinCAT-Uhr |
Detaillierte Informationen zu Distributed Clocks sind unter http://infosys.beckhoff.de angegeben:
Feldbuskomponenten → EtherCAT-Klemmen → EtherCAT System Dokumentation → Distributed Clocks