Inbetriebnahme EL72x1-xxxx
Der EK9300 unterstützt die Servo Klemmen mit dem „Drive Motion control“ Mode. Dieser Mode ermöglicht, dass eine Achse eigenständig auf eine aus den Prozessdaten vergebene Position fährt. Die Sollwertberechnungen welche in der Regel durch die NC erledigt werden, erfolgt im DMC-Mode durch die Klemme selbst.
An einem Beispiel soll die Inbetriebnahme einer EL7201-0010 an dem EK9300 gezeigt werden.
Voraussetzung:
- Min. EK9300 Firmwareversion min. „14(V0.59)“
- Min. GSDML Version „GSDML-V2.34-BECKHOFF-EK9300-20190904.XML“
- Min. EL72xx-xxxx Firmwareversion 19
- Min. EL72xx-xxxx esi-Version 30
Verwendete Hardware
- EK9300 mit der Firmwareversion 14(V0.59)
- EL7201-0010 mit Firmwareversion 19 und EL7201 ESI File EL7201-0010-9999.xml
- ZK4704-0401-0000 (Motorkabel)
- AM8112-0F20-0000
Konfiguration
Zunächst muss der EK9300 und die EL7201-0010 zu der Konfiguration hinzugefügt werden. Siehe: PROFINET Devices anfügen
Damit die Klemme den richtigen Motor verwendet, empfiehlt es sich mit der Klemme das Typenschild des Motors auszulesen. Dafür müssen die Parametereinträge „Enable auto config“, „Reconfig identical motor“ und „Reconfig non-identical motor“ in den Parameter-Einstellungen „FB OCT SettingsCh1 – Index 0x3008“ der Klemme auf „TRUE“ geändert werden.
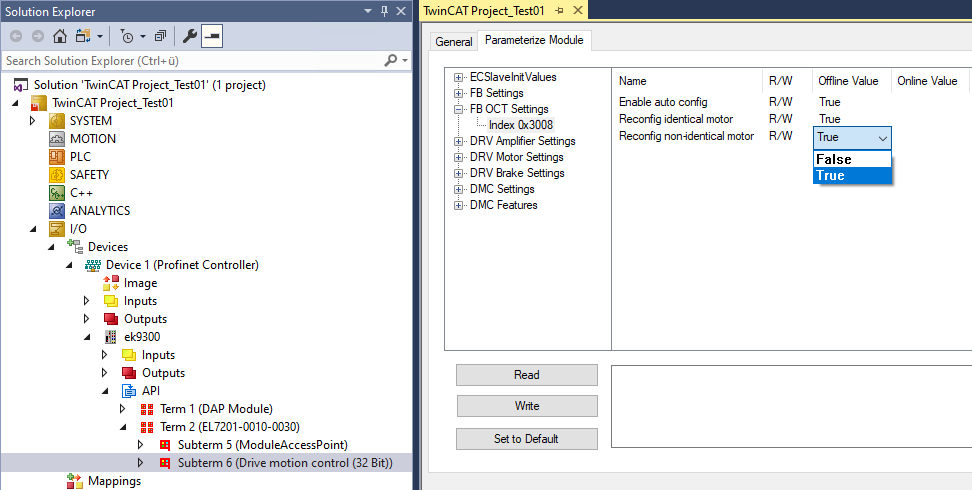 Abb.29: Parametereinstellungen zum automatischen Auslesen des verwendeten Motortypenschilds
Abb.29: Parametereinstellungen zum automatischen Auslesen des verwendeten MotortypenschildsDie Klemme liest das Typenschild des Motors aus und stellt die motorspezifischen Parameter automatisch ein. Die default Motor Settings werden nicht weiterverwendet und können bei Bedarf zurückgelesen werden.
Mapping der EL7201-0010 im „Drive Motion Control“-Format
INPUTS (64 Byte):
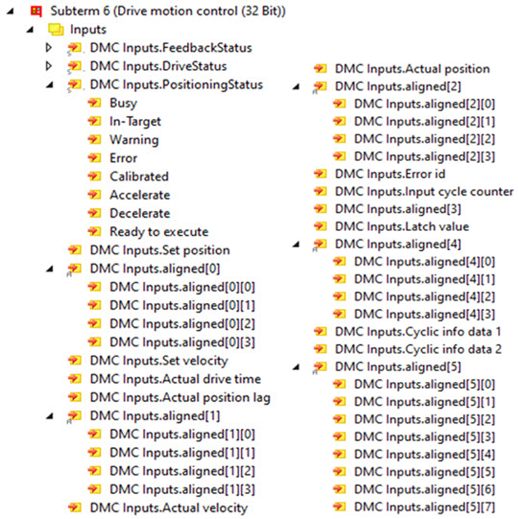 Abb.30: Drive Motion Control Inputs
Abb.30: Drive Motion Control InputsName | Size (Variable) | Bit offset |
|---|---|---|
DMC Inputs.FeedbackStatus (16 BitArray) | ||
Latch extern valid | BIT (BOOL) | 0.1 |
Set counter done | BIT (BOOL) | 0.2 |
Status of extern latch | BIT (BOOL) | 1.4 |
DMC Inputs.DriveStatus (16 BitArray) | ||
Ready to enable | BIT (BOOL) | 2.0 |
Ready | BIT (BOOL) | 2.1 |
Warning | BIT (BOOL) | 2.2 |
Error | BIT (BOOL) | 2.3 |
Moving positive | BIT (BOOL) | 2.4 |
Moving negative | BIT (BOOL) | 2.5 |
Digital input 1 | BIT (BOOL) | 3.3 |
Digital input 2 | BIT (BOOL) | 3.4 |
DMC Inputs.PositioningStatus (16 BitArray) | ||
Busy | BIT (BOOL) | 4.0 |
In- Target | BIT (BOOL) | 4.1 |
Warning | BIT (BOOL) | 4.2 |
Error | BIT (BOOL) | 4.3 |
Calibrated | BIT (BOOL) | 4.4 |
Accelerate | BIT (BOOL) | 4.5 |
Decelerate | BIT (BOOL) | 4.6 |
Ready to execute | BIT (BOOL) | 4.7 |
DMC Inputs.Set position | DWORD (32 Bit) | 6-9 |
DMC Inputs.aligned [0] | DWORD (32 Bit) | 10-13 |
DMC Inputs.Set velocity | WORD (16 Bit) | 14-15 |
DMC Inputs.Actual drive time | DWORD (32 Bit) | 16-19 |
DMC Inputs.Actual position lag | DWORD (32 Bit) | 20-23 |
DMC Inputs aligned [1] | DWORD (32 Bit) | 24-27 |
DMC Inputs.Actual velocity | WORD (16 Bit) | 28-29 |
DMC Inputs.Actual position | DWORD (32 Bit) | 30-33 |
DMC Inputs.aligned [2] | DWORD (32 Bit) | 34-37 |
DMC Inputs.Error Id | DWORD (32 Bit) | 28-41 |
DMC Inputs.Input cycle counter | Byte (8 Bit) | 42 |
DMC Inputs.aligned [3] | Byte (8 Bit) | 43 |
DMC Inputs.Latch value input | DWORD (32 Bit) | 44-47 |
DMC Inputs.aligned [4] | DWORD (32 Bit) | 48-51 |
DMC Inputs. Cycle info data1 | WORD (16 Bit) | 52-53 |
DMC Inputs.Cycle info data2 | WORD (16 Bit) | 54-55 |
DMC Inputs.aligned [5] | LWORD (64 Bit) | 56-63 |
OUTPUTS (40 Byte):
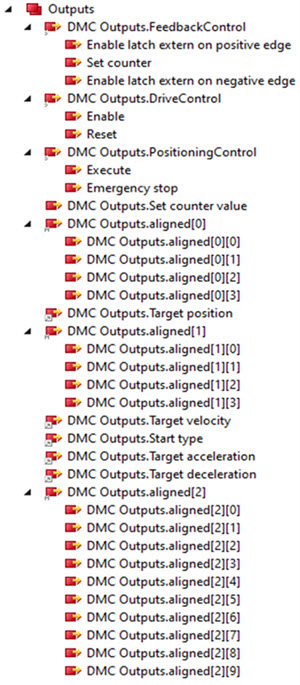 Abb.31: Drive Motion Control Outputs
Abb.31: Drive Motion Control OutputsName | Size (Variable) | Bit offset |
|---|---|---|
DMC Outputs.FeedbackControl (16 Bit Array) | ||
Latch extern valid | BIT (BOOL) | 0.1 |
Set counter done | BIT (BOOL) | 0.2 |
Status of extern Latch | BIT (BOOL) | 1.4 |
DMC Outputs.DriveControl (16 BitArray) | ||
Enable | Bit (BOOL) | 2.0 |
Reset | Bit (BOOL) | 2.1 |
DMC Outputs.PositioningControl (16 BitArray) | ||
Execute | BIT (BOOL) | 4.0 |
Emergency stop | BIT (BOOL) | 4.1 |
DMC Outputs.Set counter value | DWORD (32 Bit) | 6-9 |
DMC Outputs.aligned [0] | DWORD (32 Bit) | 10-13 |
DMC Outputs.Target position | DWORD (32 Bit) | 14-17 |
DMC Outputs.aligned [0] | DWORD (32 Bit) | 18-21 |
DMC Outputs.Target velocity | WORD (16 Bit) | 22-23 |
DMC Outputs.Start Type | WORD (16 Bit) | 24-25 |
DMC Outputs.Target acceleration | WORD (16 Bit) | 26-27 |
DMC Outputs.Target decceleration | WORD (16 Bit) | 28-29 |
DMC Outputs.aligned [0] | 10 Byte | 30-39 |
Programmablauf
- Zu Beginn muss sichergestellt werden, dass sich der EK9300 im Datenaustausch befindet.
- Dazu kann die Diagnose in TwinCAT, die Status-Prozessdaten oder die LEDs des EK9300 verwendet werden.
- Sobald der EK9300 sich im Datenaustausch befindet, kann die angeschlossene EL7201-0010 auf korrekte Funktion geprüft werden.
- Dazu werden die Error-Bits im „Drive“- bzw. im „PositioningStatus“ kontrolliert. Sind beide Status-Bit gleich „FALSE“, wird das Bit „Ready to enable“ unter „DriveStatus“ überprüft. Ist dieses gleich „TRUE“ kann das „Enable-Bit“ unter „DriveControl“ gesetzt werden.
- Wenn das Bit „Ready to execute” gleich „TRUE“ ist, kann der erste Fahrauftrag gestartet werden.
- Dazu muss die Position1) über „DMC Outputs.Target position“, die Geschwindigkeit2) über „DMC Outputs.Target velocity“, die Startbeschleunigung3) über „DMC Outputs.Target acceleration“ und die Bremsbeschleunigung3) über „DMC Outputs. Target decceleration“ sowie den Start Typ4) über „DMC Outputs.Start Type“ der Klemme übergeben werden.
- Mit dem Bit „Execute“ unter „DriveControl“ wird der Auftrag gestartet und ausgeführt.
- Das Bit „Busy“ unter „DriveStatus“ bleibt so lange „TRUE“ bis der Fahrauftrag abgearbeitet ist.
- Ist die Achse in Position, wird dies durch das Bit „In-Target“ signalisiert. Außerdem wechselt das Bit „Busy“ von „TRUE“ auf „FALSE“.
- Sobald das Bit „Busy“ auf „FALSE“ wechselt, muss das Bit „Execute“ vom Anwender „FALSE“ geschrieben werden.
- Wird „Execute“ gleich „FALSE“ geschrieben, während „Busy“ gleich „TRUE“ ist, wird der aktuelle Fahrauftrag unterbrochen und die Asche bleibt stehen.
- Um einen neuen Fahrauftrag zu übergeben, muss wieder das Bit „Ready to execute“ gefprüft werden.
1) Die Position einer Umdrehung ist 0x0010_0000 220 |
ABSOLUTE | 0x0001 | Absolute Positionierung auf eine bestimmte Zielposition |
RELATIVE | 0x0002 | Relative Positionierung zu einer berechneten Zielposition; eine angegebene Positionsdifferenz wird zur aktuellen Position addiert |
ENDLESS_PLUS | 0x0003 | Endlosfahrt in positiver Drehrichtung (direkte Vorgabe einer Geschwindigkeit) |
ENDLESS_MINUS | 0x0004 | Endlosfahrt in negativer Drehrichtung (direkte Vorgabe einer Geschwindigkeit) |
MODULO_SHORT | 0x0105 | Modulo-Positionierung entlang des kürzesten Weges zur Modulo-Position (positiv oder negativ), berechnet durch den "Modulo-Faktor" |
MODULO_PLUS | 0x0205 | Modulo-Positionierung in positiver Drehrichtung auf die berechnete Modulo-Position |
MODULO_MINUS | 0x0305 | Modulo-Positionierung in negativer Drehrichtung zur berechneten Modulo-Position |
CALI_PLC-CAM | 0x6000 | Starten Sie eine Kalibrierung mit Nocken (digitale Eingänge) |
CALI_ON_BLOCK | 0x6200 | Starten Sie eine Kalibrierung "auf Block". |
CALI_SET_POS | 0x6E00 | Wie geeicht einstellen, Position nicht verändern |
CALI_CLEAR_POS | 0x6F00 | Kalibrierungsbit löschen |
 | Anlegen einer Task für die Inbetriebnahme über TwinCAT Für die Inbetriebnahme über TwinCAT mit unseren PROFINET Controllern muss für die Ausgänge eine eigene Task angelegt werden, da sonst die Werte nicht korrekt verarbeitet werden. |
Servoklemme mit STO-Eingang:
Sollte die verwendete Klemme über einen STO-Eingang verfügen, kann dieser zu einem Fehler führen, wenn dieser nicht mit Spannung versorgt wird.
Hierbei müssen zwei Fälle unterschieden werden, welcher Fehler Auftritt.
- Der STO Eingang der Klemme ist nicht mit 24V versorgt und die Achse soll eingeschaltet werden. Dieser Fall wird durch ein „TRUE“ am „Warning Bit“ unter „DriveStatus“ und durch eine Warnung in der „DiagHistory“ in TwinCAT signalisiert. Diese Meldung kann nicht im TIA Portal ausgelesen werden.
- Die Spannung am STO Eingang der Klemme fällt im laufenden Betrieb ab. Daraufhin sollte das Fehlerbit „Error“ unter DriveStatus“ auf „TRUE“ wechseln und unter „Error ID“ der Wert 0x841Chex bzw. 33820dez angezeigt werden.
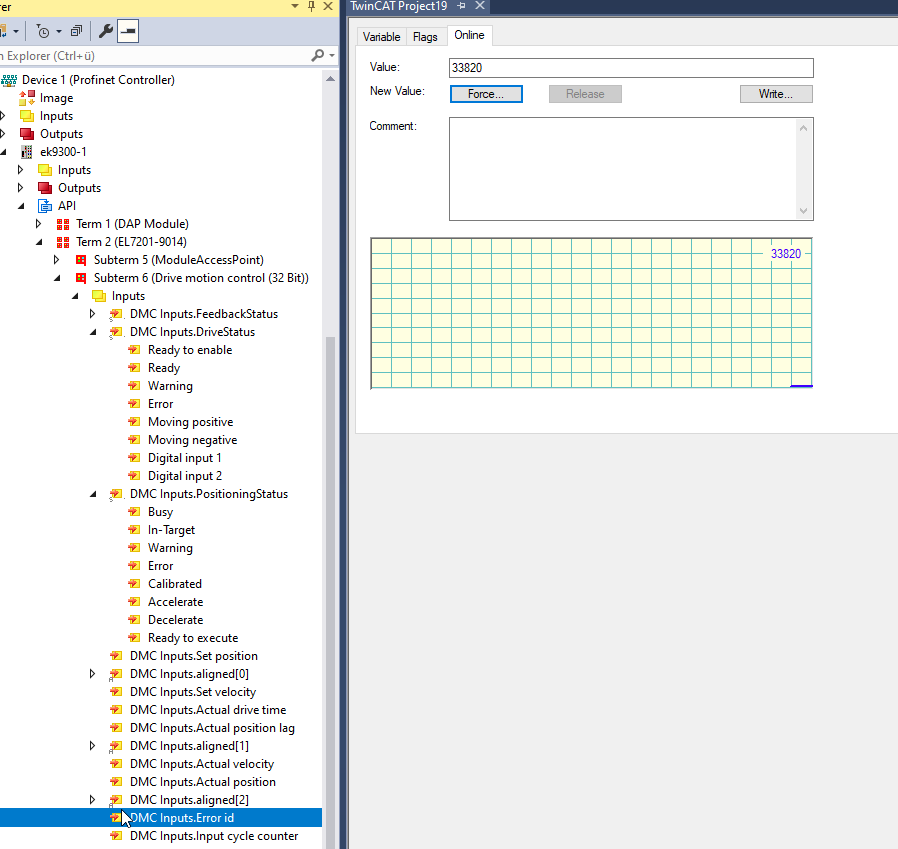 Abb.32: Darstellung der Error ID bei fehlendem STO-Eingang
Abb.32: Darstellung der Error ID bei fehlendem STO-EingangEs besteht die Möglichkeit den Zustand des STO-Eingangs in die Prozessdaten einzublenden. Dazu muss in den Parametereinstellungen der Klemme unter „DRV Amplifier Settings Ch. 2 – Select Info data x“ die Option „Input level“ ausgewählt werden. Der Zustand wird daraufhin im achten Bit des „Cyclic info data x“ angezeigt.
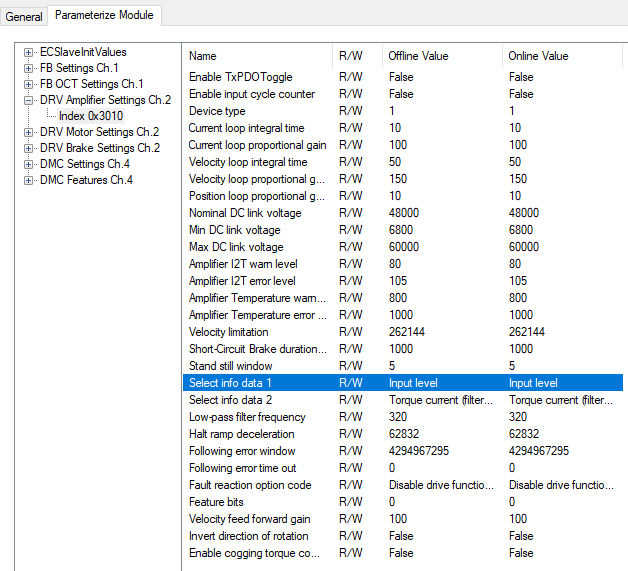
Parametereinstellungen für das Einblenden des STO-Eingangs in die Prozessdaten
Verwendung der EL7201-0010 über das TIA Portal
- Konfiguration
- In diesem Beispiel verwendete Hardware: Simatic S7-1500 CPU 1516F-3 PN/DP &ES7 516-3FN01-0AB0
- Hinzufügen der benötigten Hardware unter “Device & Networks“
- Sicherstellung einer fehlerfreien Kommunikation
- Für die Überprüfung einer fehlerfreien Kommunikation zwischen der S7-1500 und dem EK9300, muss das Programm zuerst übersetzt und auf die Steuerung geladen werden.
- Anschließend müssen alle LEDs am EK9300 grün leuchten. Sollte dies nicht der Fall sein, besteht keine bzw. eine fehlerhafte Kommunikation zwischen dem Controller und dem Device. Wenn alle LEDs grün leuchten kann über „Go online“ mit der Steuerung verbunden werden.
- Zuweisung der Prozessdaten den jeweiligen Ein- und Ausgängen
- Zunächst muss festgestellt werden, welche Ein- und Ausgangsadressen der EL7201-0010 vom TIA Portal zugewiesen wurden. Dazu muss unter „Network View“ der EK9300 ausgewählt werden, die zugewiesenen Ein- und Ausgangsadressen werden auf der rechten Seite angezeigt.
- Anschließend muss überprüft werden, welche Prozessdaten welchem Ein- bzw. Ausgang entsprechen.
- In der oberen Grafik ist zu erkennen, dass bei den Eingangsprozessdaten ein Offset von 4 besteht. Das bedeutet, dass das Prozessdatum „DMC Inputs.FeedbackStatus.Latch extern valid“ im TIA Portal die Eingangsadresse „4.1“ hat.
- Die Ausgangsprozessdaten haben in diesem Beispiel keinerlei Offset, daraus folgt, das „DMC Outputs.FeedbackControl.Latch extern valid“ die Ausgangsadresse „0.1“ hat.
- Des Weiteren ist in der Grafik die jeweilige Bytegröße der Prozessdaten angegeben.
- Um die Zuweisungen der Eingänge zu kontrollieren, muss das Programm übersetzt, auf die Steuerung geladen und online verbunden werden. Im Anschluss muss die Variablentabelle geöffnet und der Beobachtungsmodus aktiviert werden.
- Wenn die Klemme richtig angeschlossen ist und kein Fehler vorliegt, sollte der Eingang „InputCycleCounterInput“ toggeln und der Eingang „ReadyToEnableDriveInput“ auf „TRUE“ stehen.
- Automatisches auslesen der Motordaten via CoE-Parameter
- Um die Motordaten aus dem elektronischen Typenschild direkt auszulesen, müssen die CoE-Parameter unter „FB OCT Settings Ch.1“ alle auf „TRUE“ gesetzt werden.
- Dazu muss die Gerätekonfiguration unter „Device & Network“ geöffnet werden.
- Anschließend muss ein Doppelklick der linken Maustaste auf den EK9300 durchgeführt werden.
- Dadurch ist der EK9300 mit ganzen Modulen auf der rechten Seite zu sehen. Um auf die CoE-Parameter der EL7201-0010 zuzugreifen, muss das Drive Motion Control Modul ausgewählt werden.
- Anschließend muss unter „Properties“ „Module parameters“ ausgewählt werden. Daraufhin sollten die CoE-Parameter Settings der Klemme zu sehen sein.
- Die Parameter „Enable auto config”, “Reconfig identical motor” und “Reconfig non-identical motor” müssen auf TRUE gestellt werden. Um die Werte zuschreiben, muss das Projekt einmal übersetzt und neu auf die Steuerung geladen werden.
- Ein Onlinezugrief auf die CoE-Parameter funktioniert nicht. Die Werte können nur Offline verändert werden.
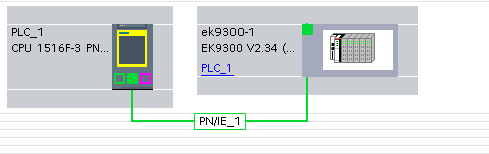 Abb.33: TIA-Portal Ansicht „Device & Networks“
Abb.33: TIA-Portal Ansicht „Device & Networks“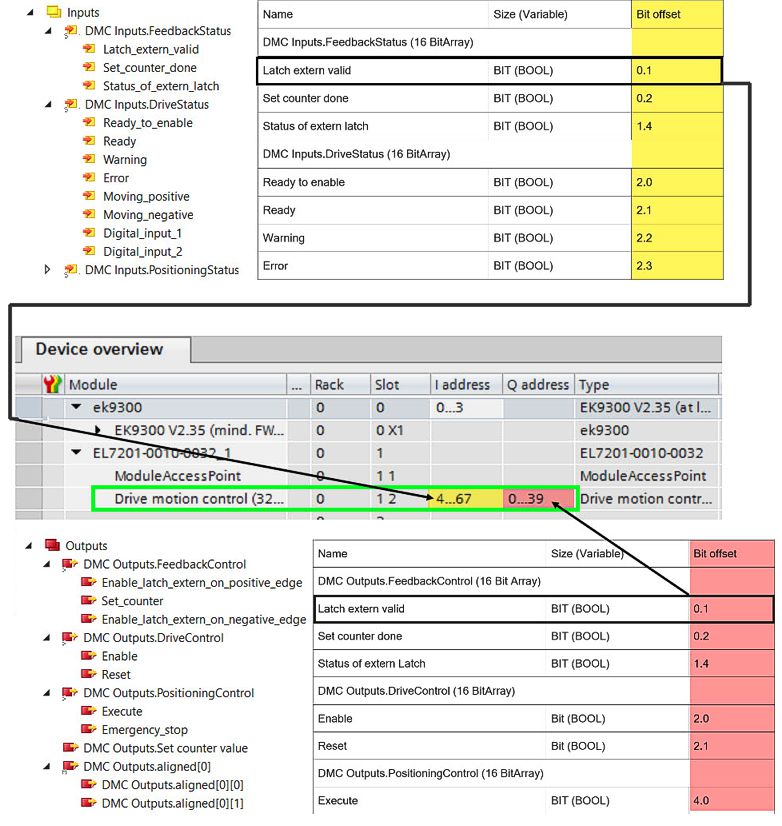 Abb.34: Beispiel Prozessdaten der EL7201 im TIA-Portal
Abb.34: Beispiel Prozessdaten der EL7201 im TIA-Portal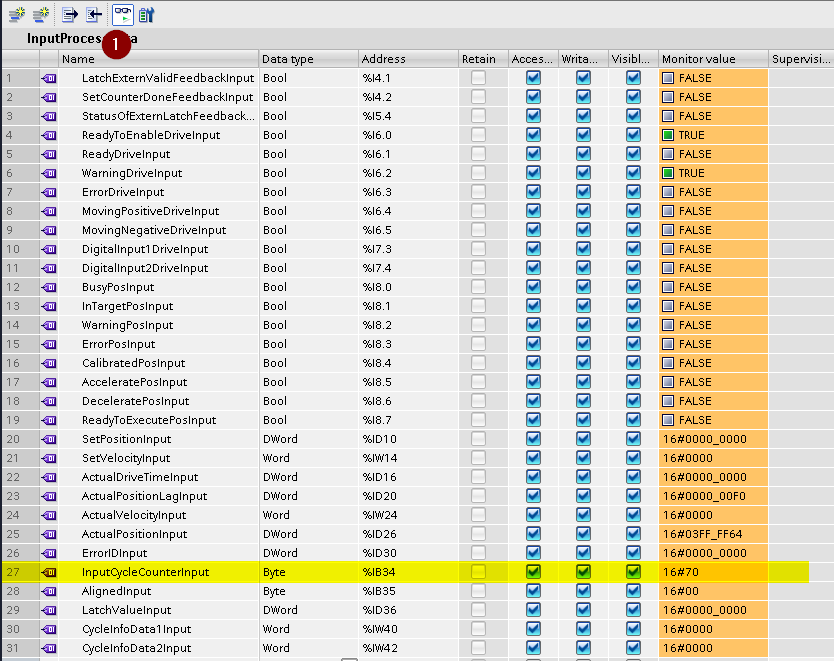 Abb.35: Ansicht TIA-Portal, Kontrolle der korrekten Zuweisung von Prozessdaten und Adressen
Abb.35: Ansicht TIA-Portal, Kontrolle der korrekten Zuweisung von Prozessdaten und Adressen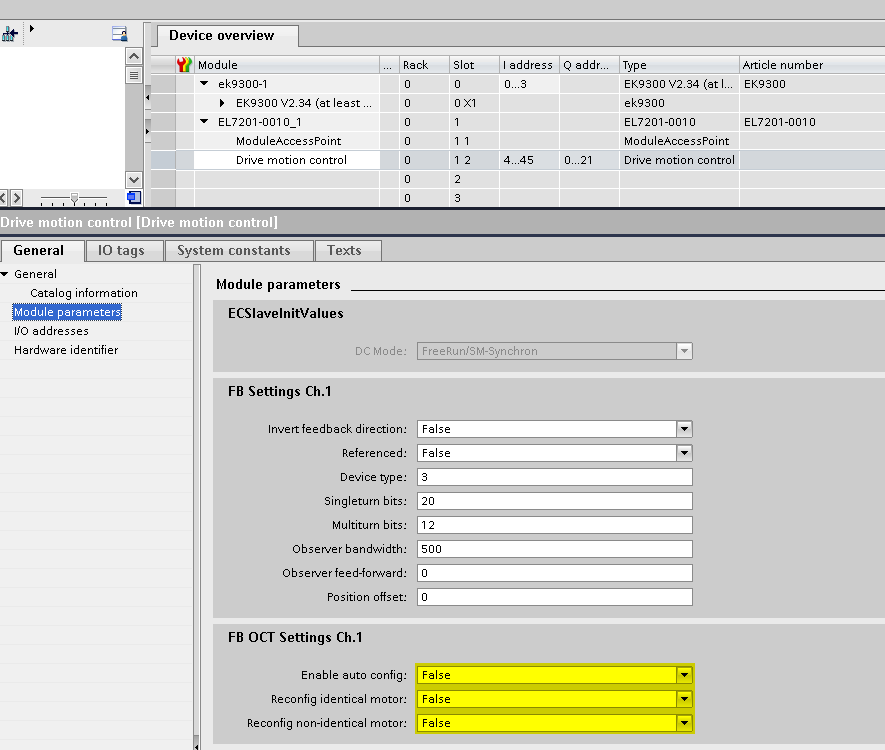 Abb.36: Ansicht TIA-Portal „Properties“-„Module parameters“
Abb.36: Ansicht TIA-Portal „Properties“-„Module parameters“