Testbeispiel mit Antriebssimulation
PLC Testumgebung
Abstandsregelung ab TwinCAT-CNC Build V2.10.1505.22
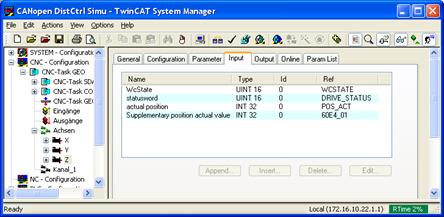
Konfiguration einer Z-Achse gemäß CANopen DS402 Antrieb mit einem zusätzlichen Abstandssensor (0x60E4_01).
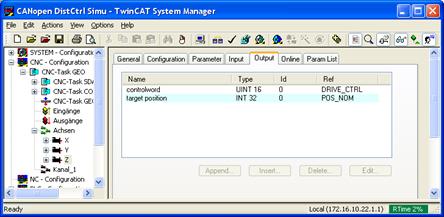
Konfiguration des CAN-Antriebs
Simulation in SPS
Simulation des CAN-PDOs über SPS-Ein-/Ausgänge
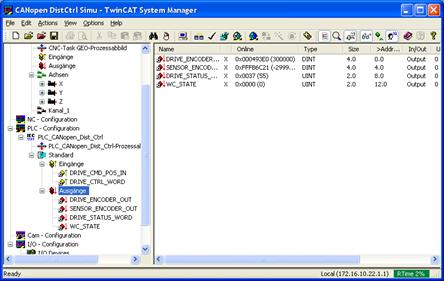
Der Encoder des Antriebs sowie der Abstandssensor sind in der SPS zusätzlich mit einen kleinen Zufallswert verrauscht.
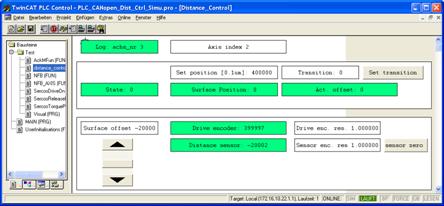
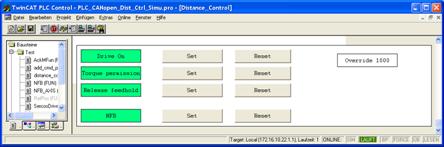
Einschalten der Antriebe
Nach Setzen der Antriebsfreigaben (Antrieb ein, Drehmoment, Feedhold aus) kann der Antrieb verfahren werden.
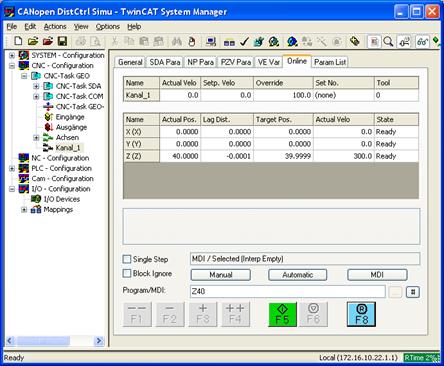
Anfahren einer Sollposition
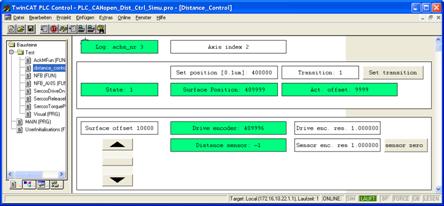
Referenzieren des Sensor, "sensor zero"
- Eintragen der Nennposition
- Position=400000
- Einschalten der Abstandsregelung
- Transition=1 (ON)
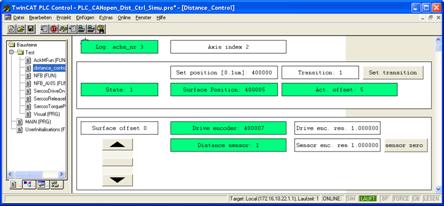
Bei der übergebenen Nennposition (SET_POS) liefert der Abstandssensor den Wert = 0.
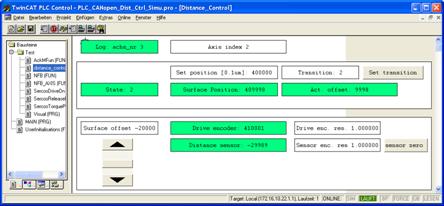
Verändern der Oberflächenposition "Surface offset"
Die geänderte Oberflächenposition ergibt eine Änderung des gemessenen Abstandssensors.
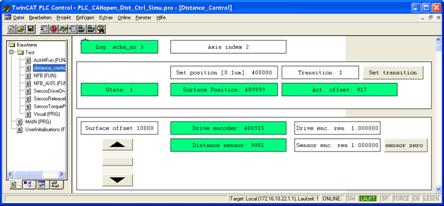
Dieser führt zu einer Nachregeln der tatsächlichen Achsposition, bis der Abstandssensor wieder den Wert = 0 aufweist. D.h. in diesem Falle wäre wieder der gewünschte Abstand zur Oberfläche erreicht.
"Einfrieren" der aktuellen Höhe
- Transition=2 (FREEZE)
Wird die Abstandsregelung unterbrochen (Transition = FREEZE = 2), so hat in dieser Zeit ein geänderter Sensorwert (20000) keinen Einfluss auf die Achskorrektur.
Nach Reaktivierung der Regelung wird auf den aktuellen Sensorwert ausgeregelt.
Ausschalten
- Transition=0 (OFF)
Nach Ausschalten der Abstandsregelung (Transition = OFF = 0) wird der Lageoffset, verursacht durch den Abstandssensor, wieder rückgängig gemacht.