K‑Bus- und E‑Bus‑Schnittstelle
Auf der rechten Seite können wahlweise EtherCAT-Klemmen (E-Bus) oder Busklemmen (K-Bus) angereiht werden; der CX7051 erkennt in der Hochlaufphase automatisch, welches System angeschlossen ist.
K-Bus-Schnittstelle
Der CX7051 liest beim Scannen die Klemmentypen aus und legt sie im System Manager unter einem Buskoppler an.
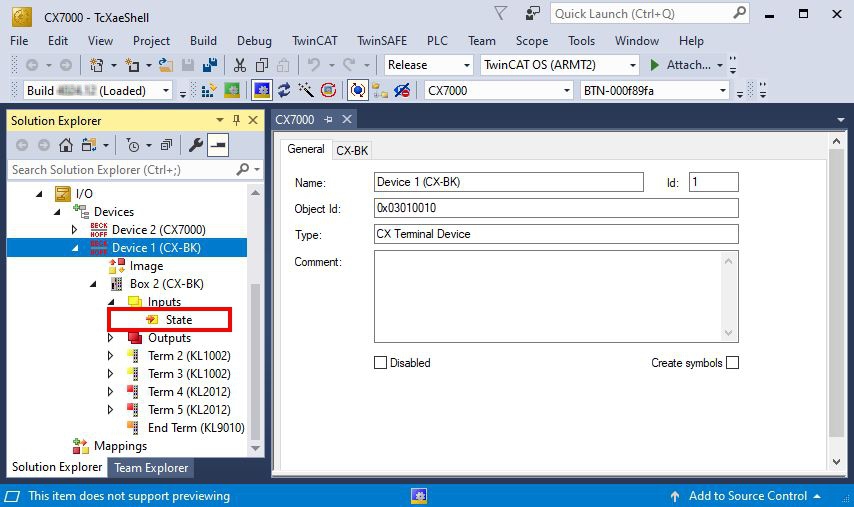 Abb.50: K-Bus-Schnittstelle eines CX7051 im TwinCAT System Manager.
Abb.50: K-Bus-Schnittstelle eines CX7051 im TwinCAT System Manager.Für die K-Bus-Diagnose gibt es in TwinCAT unter dem Buskoppler eine Status-Variable, die für Diagnosezwecke genutzt werden kann und den Status der K-Bus-Kommunikation anzeigt. Weitere Informationen finden Sie im Kapitel „Fehlerbehandlung und Diagnose“ unter K-Bus.
E-Bus-Schnittstelle (EtherCAT)
 | EoE (Ethernet over EtherCAT) EtherCAT-Slaves, die EoE für Kommunikation oder Konfiguration verwenden, werden auf dem CX7xxx derzeit nicht unterstützt. |
| Distributed-Clocks Die Embedded‑PCs der Serie CX70xx eignen sich nicht für den Einsatz mit EtherCAT‑Slaves, die Distributed Clocks verwenden oder zwingend voraussetzen. |
Auch der Betrieb von EtherCAT-Klemmen und EtherCAT-Geräten ist am CX7051 möglich. Der CX7051 erkennt auch diese Klemmen beim Scannen automatisch, liest die Klemmentypen aus und legt sie im System Manager unter einem EtherCAT-Koppler an.
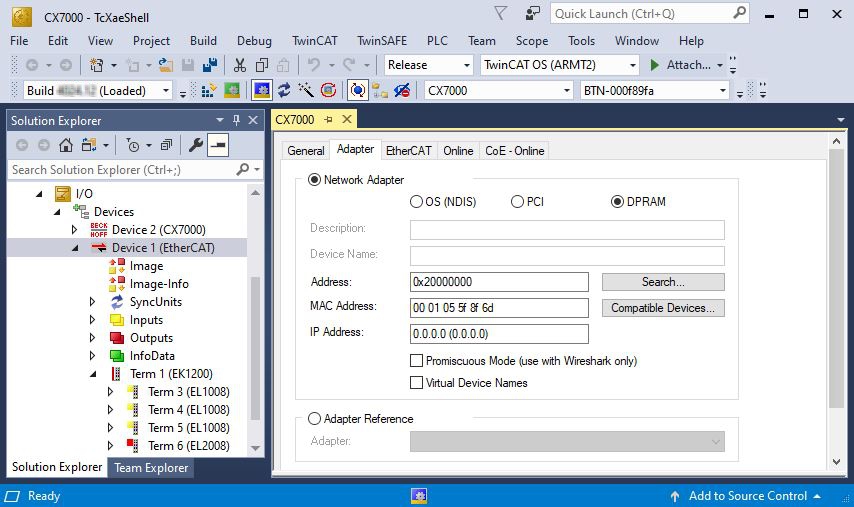 Abb.51: E-Bus-Schnittstelle eines CX7051 im TwinCAT System Manager.
Abb.51: E-Bus-Schnittstelle eines CX7051 im TwinCAT System Manager.Weitere Informationen zur Diagnose finden Sie im Kapitel „Fehlerbehandlung und Diagnose“ unter E-Bus.