IclA-Drive am SSB

Notwendiges Material:
- TwinCAT 2.9 Build 953 oder Größer
- BX3100 Version 0.80 oder Größer
- 1 x KL1xx4
- 1 x KL2xx4
- 1 x KL9010
- 1 x IclA D065 Folgende Einstellungen Slave Adresse 10, Baudrate 500 kByte (Achtung: Dies sind nicht die Default Parameter des Antriebs)
- Verkabelungsmaterial sowie Spannungsversorgung
Für den Konfigurations-Download über ADS benötigt man entweder einen BECKHOFF Feldbus-Master oder eine freie serielle Schnittstelle.
Umkonfigurierungsbeispiel für TwinCAT mit der CANopen-Masterkarte FC510x
Um den Antrieb umzustellen, kann dies mit folgendem Beispiel erfolgen.
- TwinCAT-System-Manager-File (Beispieldatei)

- TwinCAT-PLC-File (Beispieldatei)
baudratefc510x.wsm
setbaudratefc510x.pro
Beispiel Programm und Konfiguration auf dem BX-Controller
- TwinCAT-System-Manager-File (Beispieldatei)
- (Das System-Manager-File muss per ADS zum BX-Controller geladen werden).
- BX-Programm-File (Beispieldatei)
icla_example.tsm
icla_example.prx
IclA D065 - Beschreibung
Folgende Abschnitte sind Auszüge aus der Dokumentation des IclA-Drive-Handbuchs. Diese wurden uns von der Firma SIG Positec Automation GmbH für die Beschreibung der grundliegenden Parameter zur Verfügung gestellt. Weitere Informationen finden Sie unter der Internet Adresse http://www.sig-positec.de.
Hardware und Schnittstellen
- Signalschnittstelle für
- Versorgungsspannung
- Steuersignale für Manuellbetrieb
- Anschluss für Not-Aus-Signal
- Schutzleiteranschluss für die Erdung über PE-Sammelschiene
- Feldbusanschluss für den Anschluss des Feldbuskabels.
Wird die Not-Aus-Funktion nicht benötigt, verbinden Sie Pin 2 mit Pin 8 oder 9 (24 VDC).
Control-Wort 0x6040
Das Objekt stellt das Steuerungswort des Geräts dar. Mit dem Control-Wort werden mehrere Steuerungsaufgaben erfüllt:
- Wechsel zwischen den verschiedenen Betriebszuständen. Die möglichen Zustände und Übergänge finden Sie unter dem Index-Schlagwort „Zustandsmaschine". Relevant für einen Zustandswechsel sind die Bits 0 bis 3 und Bit 7.
- Starten und Unterbrechen von betriebsartenspezifischen Funktionen, z. B. Starten eines Fahrauftrags über das Bit 4. Die Bits 4 bis 6 werden für betriebsartenspezifische Einstellungen benutzt. Einzelheiten finden Sie unter den Schlagworten „Betriebsart, starten", „Betriebsart, überwachen" und bei der Beschreibung der jeweiligen Betriebsarten in den Kapiteln „Manuellbetrieb" und „Positionierbetrieb".
- Stoppen des Positionierantriebs aus einem laufenden Fahrbetrieb. Zum Anhalten wird das Bit 8 „Halt" benutzt Einzelheiten finden Sie unter den Schlagworten „Betriebsart, starten" und „Betriebsart, überwachen".
Objektbeschreibung | Wertebeschreibung |
|---|---|
Index | 6040h |
Objektname | Control-Wort |
Datentyp | Integned16 |
Subindex | 00h, Control-Wort |
Zugriff | read-write |
PDO-Mapping | R_PDO |
Bit | Bezeichnung | Bedeutung |
|---|---|---|
11..15 | Manufacturer specific | nicht benutzt |
9, 10 | - | reserviert |
8 | Halt | Motor stoppen |
7 | Reset fault | Fehler rücksetzen |
4..6 | - | betriebsartenabhängig, |
3 | Enable operation | Betriebsart ausführen |
2 | Quick Stop (low aktiv) | Abbremsen mit Quick Stop-Rampe |
1 | Disable voltage (low aktiv) | Spannung ausschalten |
0 | Switch on | betriebsbereit schalten |
Statusword 0x6041
Das Objekt beschreibt den aktuellen Betriebszustand des Geräts. Mit dem Status-Wort führen Sie folgende Überwachungsfunktionen durch:
- Prüfen des Betriebszustands der Positioniersteuerung. Dazu sind die Bits 0 bis 3, 5 und 6 relevant.
- Das Bit 4 zeigt an, ob die Endstufe bereit ist, einen Fahrauftrag zu bearbeiten.
- Die Bits 7 bis 15 werden zur Überwachung des Fahrbetriebs und zur Statusüberwachung gerätespezifischer Zustände benutzt.
Einzelheiten zur Überwachung des Fahrbetriebs finden Sie unter den Schlagworten „Betriebsart, starten", „Betriebsart, überwachen" und bei der Beschreibung der jeweiligen Betriebsarten in den Kapiteln „Manuellbetrieb" und „Positionierbetrieb". Die Bits zur Statusüberwachung des Geräts sind im Kapitel „Diagnose und Fehlerbehebung" beschrieben.
Das Steuerungswort ist in den ersten beiden Byte der R_PDOs abgebildet.
Objektbeschreibung | Wertebeschreibung |
|---|---|
Index | 6041h |
Objektname | Status-Wort |
Datentyp | Unsigned16 |
Subindex | 00h, Status-Wort |
Zugriff | read-only |
PDO-Mapping | T_PDO |
Bit | Bezeichnung | Bedeutung |
|---|---|---|
15 | Out of security area | Sicherheitsbereich verlassen |
14 | Out of drive area | Fahrbereich verlassen |
12..13 | - | betriebsartenabhängige Bedeutung |
11 | Internal limit active | Arbeitsbereich verlassen |
10 | Target reached | Ziel erreicht |
9 | Remote | 0: Manuellbetrieb |
8 | Right out of drive area | Nur gültig, wenn Bit 11 = 1 |
7 | Warning | Warnung |
6 | Switch on disabled | nicht betriebsbereit |
5 | Quick Stop | Quick Stop aktiv |
4 | Voltage disabled | Spannung ausgeschaltet |
3 | Fault | Fehler aufgetreten |
2 | Operation enabled | Betriebsart aktiviert |
1 | Switched on | betriebsbereit |
0 | Ready to switch on | einschaltbereit |
Referenzierungsbereiche
Eine gültige Referenzierung wird über drei Endschalterzonen definiert, die im möglichen Verfahrbereich des Antriebs liegen müssen. Die Endschalter schützen Antrieb und Anlage vor einer Beschädigung.
- Arbeitsbereich W0 - W1 für den Positionierbetrieb.
- Fahrbereich D0 - D1. Aus den Bereichen D0 - W0 und D1 - W1 kann
- der Antrieb nur in Richtung Arbeitsbereich zurückgefahren werden.
- Sicherheitsbereich S0 - S1. Aus den Bereichen S0 - D0 und S1 - D1 kann der Antrieb nur manuell zurückbewegt werden.
- CANopen-Objekte Für die Einrichtung der Endschalter werden drei CANopen-Objekte eingesetzt, in denen die Positionswerte für die obere und untere Bereichsgrenze eingetragen werden.
- Grenzen des Arbeitsbereichs in software position limit (607Dhex)
- Grenzen des Fahrbereichs in software position drive limit (2009hex)
- Grenzen des Sicherheitsbereichs in software position safety limit (2008hex)
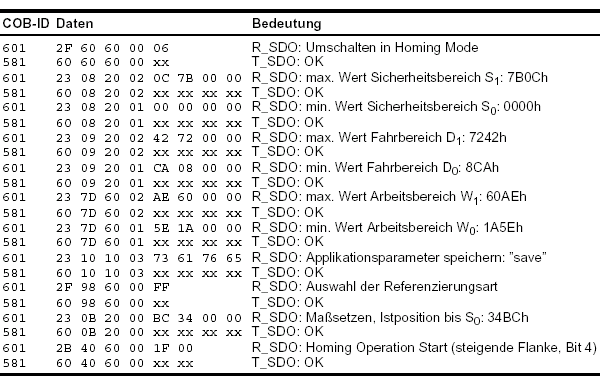
Bespiel für eine Referenzierung
Das folgende Listing zeigt die Eingabe der Referenzierungswerte. Die Knotenadresse des Positionierantriebs ist auf 01hex eingestellt.