Beschreibung
Mechanische Lose
Als mechanische Lose wird das Spiel zwischen Antrieb und einem bewegten Maschinenteil oder zwischen einem Geber und einem bewegten Maschinenteil bezeichnet. Durch die mechanische Lose ergibt sich für ein bewegtes Maschinenteil eine Abweichung zwischen kommandierter Position und der tatsächlichen Istposition. Dies wirkt sich insbesondere bei der Bewegungsrichtungsumkehr aus.
Es wird bei der mechanischen Lose zwischen den nachfolgend erläuterten Arten unterschieden:
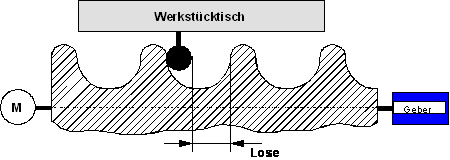
Positive Lose
Die positive Lose tritt bei Systemen auf, bei denen das Meßsystem direkt mit dem Antrieb verbunden ist und die Lose zwischen Antrieb und bewegtem Maschinenteil auftritt. Bei einer Bewegungsrichtungsumkehr wird das Meßsystem eine Positionsänderung detektieren, obwohl sich das Maschinenteil bedingt durch die Lose noch nicht bewegt. Dies führt dazu, dass das Maschinenteil nicht die kommandierte Position erreicht, sondern um den Betrag der Lose zu kurz verfährt, da der Geber der indirekt die Position des Maschinenteils misst, der tatsächlichen Istposition des Maschinenteils vorauseilt.
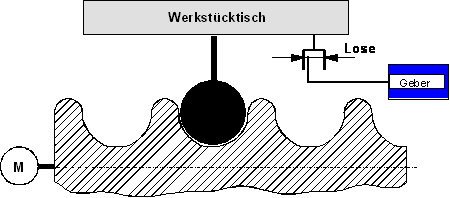
Negative Lose
Die negative Lose tritt bei Systemen auf, bei denen die Lose zwischen dem bewegten Maschinenteil und dem Meßsystem auftritt. Bei einer Bewegungsumkehr verfährt das Maschinenteil unmittelbar in die neue Richtung, ohne dass das Meßsystem eine Positionsänderung detektiert. In diesem Fall verfährt das Maschinenteil um die Lose weiter als durch die Kommandierung erforderlich ist, da der Geber, der die Position des Maschinenteils direkt misst, der tatsächlichen Position des Maschinenteils nacheilt.
Losekompensation
Die Auswirkung der Lose kann bei allen Antriebstypen kompensiert werden.
Die Größe der Lose P-AXIS-00103 wird bei der Lageregelung in Abhängigkeit von der Art der auftretenden mechanischen Lose P-AXIS-00021 berücksichtigt und wirkt sich auf die Berechnung der Führungsgrößen aus.
Hinweis | |
Die Ausgabe der absoluten Istposition des bewegten Maschinenteils beinhaltet die Kompensationswerte nicht und stellt somit die Position einer idealen Maschine dar. |
Wirkung
Bei angewählter Losekompensation ist diese unmittelbar nach dem Hochfahren der Steuerung aktiv, unabhängig davon, ob eine Referenzpunktfahrt durchgeführt wurde.
Durch den Algorithmus wird die Lose im ersten Takt der Verfahrbewegung kompensiert. Bei einer großen Lose kann das eine starke Anregung der Maschine bewirken. Um dies zu vermeiden, kann das Ausfahren der Lose über mehrere Lagereglerzyklen verteilt werden P-AXIS-00243.