Reversierbetrieb
Mit der Funktion „Reversing sequence“ haben Sie die Möglichkeit, Ihre Achsen zwischen einer definierten Startposition und Endposition zu verfahren.
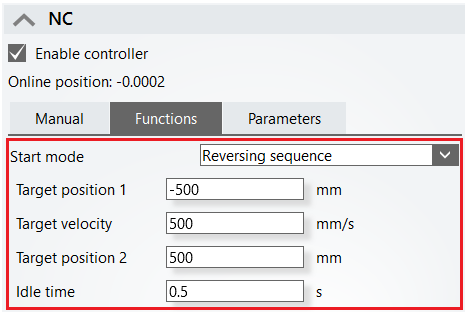
- ►„Enable controller“ aktivieren
- ►Startposition „Target position 1“ und Zielposition „Target position 2“ eingeben
- ►Geschwindigkeit „Target velocity“ und Wartezeit „Idle time“ eingeben
Automatisches Scope View
Sie haben die Möglichkeit, den Reversierbetrieb mit einer automatische Scope View-Aufzeichnung gleichzeitig zu starten.

- ►„Trigger start/stop scope“ aktivieren
- ►Reversierbetrieb mit Start/Stop aktiveren/deaktivieren
Folgende Einstellmöglichkeiten stehen zur Verfügung:
Begriff | Erläuterung |
|---|---|
Target position 1 | Startposition der zu verfahrenden Achse |
Target position 2 | Zielposition der zu verfahrenden Achse |
Target velocity | Geschwindigkeit mit der Ihre Achse im Reversierbetreib zwischen der Startposition und der Zielposition verfährt |
Idle time | Wartezeit zwischen den gestarteten Verfahrwegen |
Trigger start/stop scope | Aktivierung und Stop der automatischen Scope View-Aufzeichnung |