Elektronische Kommutierung
Diese modernen Motoren erzeugen das für den Motorenlauf notwendige Wechselfeld über eine elektronische Schaltung, verschleißfrei und reibungslos. Der eingesetzte Motortyp und das eingesetzte Gebersystem entscheidet über das Kommutierungsverfahren.
Absolutes Gebersystem (Motor-Feedback) innerhalb einer Umdrehung
Beispiele für diese Art von Gebersystemen sind: Resolver, EnDat, BiSS und HIPERFACE
Hierbei kommen zwei unterschiedliche Kommutierungsverfahren zur Anwendung:
Mechanische Justierung des Gebers
Das Gebersystem des Motors ist vom Werk aus mechanisch justiert (Geber und Rotor sind aufeinander abgeglichen), aber die Rotorposition ist unbekannt.
Der Kommutierungswinkel wird einmalig mit dem Kommando P160 über die IDN "P0-0-165_Command mode_Static current vector" und die IDN "P-0-057 "Electrical commutation offset" ermittelt, d.h. in P-0-0058 wird der entsprechende mechanische Winkel vom Gebersystem kommend, angezeigt und ausgelesen, und in die IDN "P-0-0150_Parameter chanel_Adjustable commutation offset" (Motordatenbank) gespeichert. Damit der Parameter verwendet werden kann, muss die IDN "P-0-0150_Parameter chanel_Commutation mode" (Motordatenbank) auf 3: "Adjustable offset" eingestellt werden. Der zugehörige Wert der IDN "P-0-057 "Electrical commutation offset" wird ebenfalls in der Motordatenbank gespeichert.
Elektronische Justierung des Gebersystems
 | Synchron-Motoren! Die elektronische Justierung ist nur bei Synchron-Motoren erforderlich. Bei Asynchron-Motoren wird das Magnetfeld des Rotors elektronisch erzeugt und kann somit passend zu dem elektromagnetischen Feld der Wicklung gestellt werden. |
Je nach Gebersystem gibt es wiederum zwei unterschiedliche Kommutierungsverfahren:
- Der Geber ist vom Hersteller immer in der gleichen rotatorischen Position auf dem Rotor angebracht, aber die Rotorposition ist unbekannt
Der Kommutierungswinkel wird einmalig mit dem Kommando P160 über die IDN "P0-0-165_Command mode_Static current vector" und die IDN "P-0-057 "Electrical commutation offset" ermittelt, d.h. in P-0-0058 wird der entsprechende mechanische Winkel vom Gebersystem kommend, angezeigt und ausgelesen, und im Datenspeicher des Gebersystems (Ausnahme) und in die IDN "P-0-0150_Parameter chanel_Adjustable commutation offset" (Motordatenbank) gespeichert. Damit der Parameter verwendet werden kann, muss die IDN "P-0-0150_Parameter chanel_Commutation mode" (Motordatenbank) auf 3: "Adjustable offset" eingestellt werden. Der zugehörige Wert der IDN "P-0-057 "Electrical commutation offset" wird ebenfalls in der Motordatenbank gespeichert. Dieses Verfahren erfordert ein Gebersystem mit Datenspeicher und Datenleitung. - Der Winkel zwischen Gebersystem und Rotor wird vom Motorhersteller mit einem geberspezifischen Kommando ermittelt und dem Gebersystem übermittelt. Das Gebersystem speichert diesen Winkel und verrechnet ihn intern, aber die Rotorposition ist unbekannt.
Der Kommutierungswinkel wird einmalig mit dem Kommando P160 über die IDN "P0-0-165_Command mode_Static current vector" und der IDN "P-0-057 "Electrical commutation offset" ermittelt, d.h. in P-0-0058 wird der entsprechende mechanische Winkel vom Gebersystem kommend, angezeigt und ausgelesen, und im Datenspeicher des Gebersystems (Ausnahme) und in die IDN "P-0-0150_Parameter chanel_Adjustable commutation offset" (Motordatenbank) gespeichert. Damit der Parameter verwendet werden kann, muss die IDN "P-0-0150_Parameter chanel_Commutation mode" (Motordatenbank) auf 3: "Adjustable offset" eingestellt werden. Bei internen Berechnungsvorgängen wird dieser Winkel immer mit verrechnet. Dieses Verfahren erfordert ein intelligentes Gebersystem.
Nicht absolutes Gebersystem (Feedback) innerhalb einer Umdrehung
Beispiele für diese Art von Gebersystemen sind: SIN / COS 1Vss
In diesem Fall muss ein spezieller Kommutierungsvorgang (wake&shake) gestartet werden um den Kommutierungswinkel zu ermitteln. Dieser Winkel wird intern gespeichert und beim Betrieb berücksichtigt. Wird der AX5000 ausgeschaltet oder wird die "EtherCAT-State machine" in "Pre-op" oder tiefer geschaltet, geht der Kommutierungswinkel auf Grund des nicht absoluten Gebersystems verloren. "wake&shake" kann nur fehlerfrei funktionieren, wenn das Antriebssystem stabil läuft, d.h. es sollten keine Schwingungen auftreten, welche den Motor von außen beeinflussen. Weiterhin ist bei der Erstinbetriebnahme eine Stabilitätsuntersuchung mit den Default-Werten der "IDN P-0-0165" notwendig.
| Schwingungsfähiges System! Für diese Stabilitätsuntersuchung ist es wichtig, die Applikation im Vorfeld zu analysieren und den ungünstigsten Fall der Schwingung zu ermitteln. Dieser Fall kann sowohl unter Lastbedingungen, als auch ohne Last vorliegen. |
| |
Vorsicht, Verletzungsgefahr durch unkontrollierte Bewegungen! Bei dem nachfolgend beschriebenen Verfahren wird die Motorwelle unmittelbar auf eine bestimmte Position gebracht. Stellen Sie sicher, dass Ihre Applikation diese Bewegung erlaubt und sichern Sie die Umgebung gegen unbeabsichtigtes Betreten ab und stellen Sie sicher, dass sich keine Personen im Gefährdungsbereich befinden. |

Schwingungsfähiges System
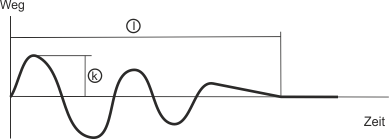
Bei einem schwingenden System müssen Sie den Schwingungsverlauf analysieren und entsprechende Maßnahmen zur Dämpfung treffen. Schwingungen wirken sich immer beim "wake&shake" in Phase 2 aus, in Phase 1 sind Schwingungen eher unkritisch.
|
|
|
Abklingende Schwingung |
|
|
|
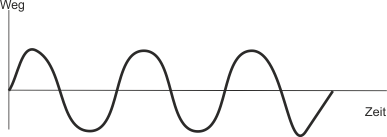
Konstante Schwingung |
|
|
|
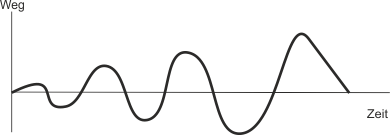
Ansteigende Schwingung |
Im Zuge dieser Untersuchung wird die Motorwelle auf frei definierbare elektrische Positionen mittels Stromeinprägung gedreht. Nach Abschaltung der Stromeinprägung sollte der Motor in seiner erreichten Position stehen bleiben. BECKHOFF empfiehlt die Positionen 0°, 90°, 180° und 270°. Bei kritischen Applikationen sollten anstatt vier, acht Positionen gewählt werden (0°, 45°, 90°, 135° ...270°). Die Parametrierung der Stromeinprägung erfolgt in der IDN P-0-0165 unter "Static current vektor", die frei wählbare elektrische Position wird in der IDN P-0-0057 eingestellt. Bei jeder Stellung ist "wake&shake" durchzuführen und nur bei fehlerfreiem Durchlauf ist die Stabilität des Systems gewährleistet.
Wake&shake
| Schwingendes System! Wenn die Applikation schwingt, müssen Sie auf der mechanischen Seite Abhilfe schaffen. Sie können die Kommutierung mittels wake&shake bedingt durchführen, sollten aber durch geschickte Parameterwahl bei der IDN "P-0-0165" den Einfluss der Schwingung so klein wie möglich halten, da es durch zu starkes Nachschwingen zu einem Kommutierungsfehler kommt, der aus der Tatsache resultiert, dass der nach Beendigung des Kommandos gemessene Winkel als Kommutierungswinkel eingetragen wird. |
| |
Vorsicht, Verletzungsgefahr durch unkontrollierte Bewegungen! Bei dem nachfolgend beschriebenen Verfahren wird die Motorwelle schrittweise bewegt. In Phase 1 beträgt die max. elektrische Bewegung 8 x (Wert aus "P-0-0-0165_Fist phase position monitoring limit"). In Phase 2 beträgt sie 0,5 x (Wert aus "P-0-0-0165_Fist phase step width"). Diese Formel gilt nur, wenn die vorangegangene Stabilitätsuntersuchung positiv abgeschlossen wurde. Stellen Sie sicher, dass Ihre Applikation diese Bewegung erlaubt und sichern Sie die Umgebung gegen unbeabsichtigtes Betreten ab und stellen Sie sicher, dass sich keine Personen im Gefährdungsbereich befinden. |
Die Kommutierungsfunktion wake&shake besteht aus 2 Phasen. In Phase 1 wird eine grobe Ortsbestimmung des Rotors vorgenommen und in Phase 2 erfolgt die genaue Ortsbestimmung. Das Ziel der Kommutierungsfunktion ist, die exakte Ortsbestimmung des Rotors bei minimaler Bewegung durchzuführen.
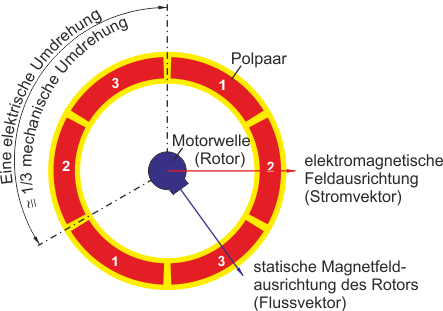
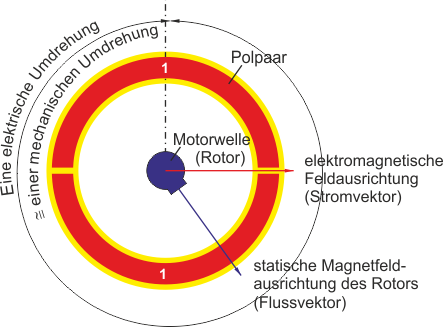
Bei Servomotoren besteht durch die Polpaare ein unmittelbarer Zusammenhang zwischen elektrischer und mechanischer Umdrehung. Eine elektrische Umdrehung entspricht immer einer mechanischen Umdrehung geteilt durch die Anzahl der Polpaare. In dem folgenden Beispiel ist zwecks einfacherer Berechnung ein Motor mit einem Polpaar dargestellt.
Die Parametrierung erfolgt über die IDN P-0-0165 "Commutation offset calibration parameter". Die Winkelangaben beziehen sich immer auf elektrische Umdrehungen!
IDN P-0-0165 - Commutation offset calibration parameter
|
Parameter |
Default |
Beschreibung |
|---|---|---|
|
Command mode |
0: Static current vector |
Auswahl zwischen zwei Kommutierungsverfahren |
|
Activation |
0: manual |
Auswahl, wann der Kommutierungsvorgang gestartet wird |
|
Static current vector |
|
Kommutierungsverfahren |
|
Current level |
Stillstandsstrom in % |
Stromstärke des Stromvektors (Angabe = 100% x P0-0093 / P0-0092) |
|
Duration |
3000 ms |
Zeitraum in der die parametrierte Stromstärke gehalten wird, damit sich evtl. vorhandene Schwingungen beruhigen können und so ein optimaler Kommutierungswinkel erreicht wird |
|
Wake and shake |
|
Kommutierungsverfahren |
|
First phase current vector |
Stillstandsstrom in % |
|
|
First phase ramp up time |
100 ms |
|
|
Second phase current level |
Stiilstandsstrom in % |
|
|
Second phase ramp up time |
500 ms |
Zeit in der der Stromvektor "g" seine parametrierte Stärke erreicht |
|
Commutation pos control: Kp |
0,04 |
Verstärkungsfaktor. Achtung: Wenn "0", dann wird in Phase 2 die Variante 2 durchgeführt |
|
Wake and shake expert |
|
Achtung: Nur erfahrene Anwender sollten die folgenden Parameter ändern! |
|
First phase pos monitoring limit |
0,5 Grad |
|
|
First phase step width |
22,5 Grad |
|
|
First phase waiting time after step |
150 ms |
|
|
Second phase duration |
3000 ms |
|
|
Error monitoring (range of motion) |
90 Grad |
Max. Bewegung des Rotors bevor abgeschaltet wird, da sonst die Gefahr besteht, dass der Motor eine unkontrollierte Bewegung ausführt. |
|
|
= Bezugskennzeichen für untenstehende Beschreibung | |
 Stromstärke des Stromvektors (Angabe = 100% x P0-0093 / P0-0092)
Stromstärke des Stromvektors (Angabe = 100% x P0-0093 / P0-0092) Zeit in der der Stromvektor "a" seine parametrierte Stärke erreicht
Zeit in der der Stromvektor "a" seine parametrierte Stärke erreicht Stromstärke des Stromvektors (Angabe = 100% x P0-0093 / P0-0092)
Stromstärke des Stromvektors (Angabe = 100% x P0-0093 / P0-0092) Mindestdrehwinkel des Rotors für eine Bewegungserkennung
Mindestdrehwinkel des Rotors für eine Bewegungserkennung Zeitraum zwischen der Bewegungserkennung und dem nächsten Step in Phase 1 bzw. zwischen Phase 1 und Phase 2 (Das evtl. schwingende System kann sich beruhigen)
Zeitraum zwischen der Bewegungserkennung und dem nächsten Step in Phase 1 bzw. zwischen Phase 1 und Phase 2 (Das evtl. schwingende System kann sich beruhigen) Zeitraum in der die parametrierte Stromstärke gehalten wird, damit sich evtl. vorhandene Schwingungen beruhigen können und so ein optimaler Kommutierungswinkel erreicht wird
Zeitraum in der die parametrierte Stromstärke gehalten wird, damit sich evtl. vorhandene Schwingungen beruhigen können und so ein optimaler Kommutierungswinkel erreicht wird|
|
Motor mit 3 Polpaaren |
|
Motor mit einem Polpaar |
|
|
| ||
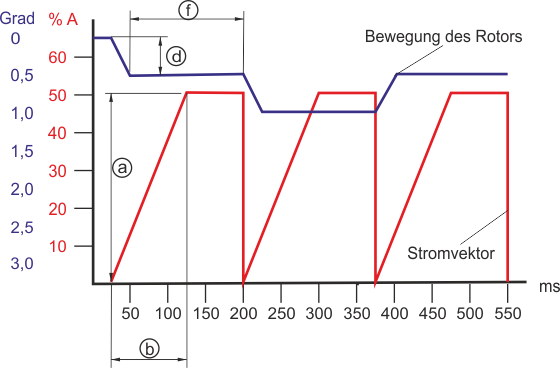
Phase 1 - Grobe Ortsbestimmung des Rotors (Motorwelle)
Step 1:
|
|
|
Ablauf: |
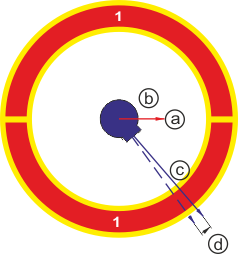
 = Flussvektor des Rotors mit Permanentmagnet.
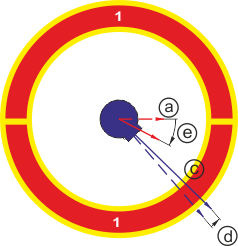
= Flussvektor des Rotors mit Permanentmagnet.Step 2:
|
|
|
Ablauf: |
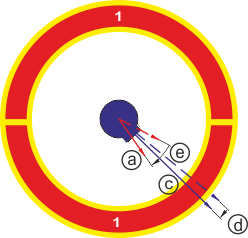
Step 3:
|
|
|
Ablauf: |
Beispielhafte Darstellung eines Scopes von Phase 1:
Phase 2 - Genaue Ortsbestimmung des Rotors (Motorwelle)
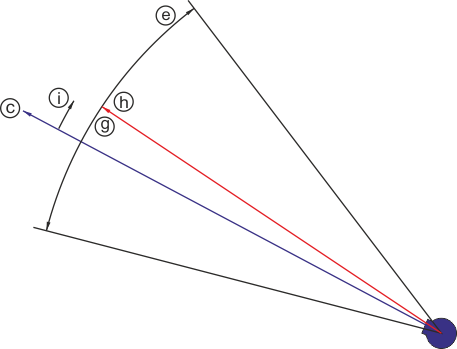
In Phase 2 gibt es zwei Varianten für die genaue Ortsbestimmung. Bei der ersten Variante bewegt sich der Rotor nur minimal, Voraussetzung ist aber ein sehr stabiles System mit nur geringer Schwingungsneigung. Bei der zweiten Variante kann sich der Rotor max. um die hälfte des Sektors  bewegen, sie ist aber deutlich toleranter gegen Schwingungen.
bewegen, sie ist aber deutlich toleranter gegen Schwingungen.
Mit dem eingestellten Wert des Parameters IDN-P-0-0165 "Commutation pos control: Kp" wird gesteuert, welche Variante angewendet wird:'
IDN-P-0-0165 "Commutation pos control: Kp" > 0 --> Variante 1
IDN-P-0-0165 "Commutation pos control: Kp" = 0 --> Variante 2
Variante 1 (IDN-P-0-0165 "Commutation pos control: Kp" > 0 ):
|
|
|
Ablauf: |
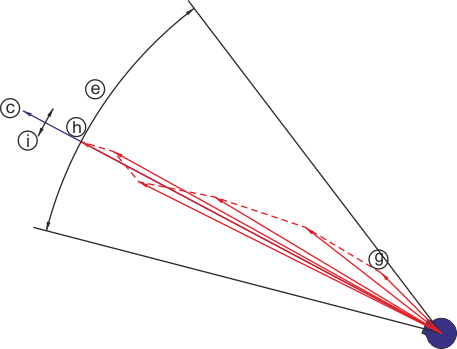
 = Bewegung des Rotors
= Bewegung des RotorsVariante 2 (IDN-P-0-0165 "Commutation pos control: Kp" = 0 ):
|
|
|
Ablauf: |
Einflussnahme mittels der IDN P-0-0165 auf wake&shake
|
Parameter |
Default |
Mögliche Ursachen, die eine Änderung des Default-Wertes erfordern |
|---|---|---|
|
First phase current level |
Stillstandsstrom in % |
Schwergängiges System, |
|
First phase ramp up time |
100 ms |
Schwergängiges System, |
|
First phase pos monitoring limit |
0,5 grad |
Applikation lässt unkontrollierte Bewegungsänderungen nur sehr eingeschränkt zu |
|
Fist phase step width |
22,5 grad |
|
|
First phase waiting time after step |
150 ms |
Abklingverhalten des Systems: |
|
Second phase current level |
Stillstandsstrom in % |
|
|
Second phase ramp up time |
500 ms |
|
|
Second phase duration |
3000 ms |
|
|
Error monitoring (range of motion) |
90 grad |
Applikation lässt unkontrollierte Bewegungsänderungen nur sehr eingeschränkt zu |
|
Commutation pos control: Kp |
0,04 |
Hohe Laststeifigkeit --> Wert erhöhen Sonderfall "0": In Phase 2 wird die Variante 2 durchgeführt |