Asynchronmotoren
Mit dem AX5000 haben Sie die Möglichkeit, mit einem günstigen Standardnormmotor in Kombination mit einem preiswerten, inkrementellen Geber einen guten Positionierantrieb zu realisieren.
Linear
Lineare Asynchronmotoren werden zurzeit nicht unterstützt.
Rotatorisch
1. Motorauswahl
Sie können entweder einen vorhandenen Motor auswählen (1) oder Motorparameter für einen neuen Motor anlegen (2). Nach der Auswahl klicken Sie auf "OK". (3) um zum nächsten Menü zu gelangen
2. Charakteristische Motordaten
Im nächsten Menü werden charakteristische Motordaten eingetragen bzw. ausgewählt. Der Expertenmodus (9) wird momentan nicht unterstützt. Die Parameter (4) und (5) sind vorbelegt, Sie brauchen sie nicht zu ändern. Im Parameter (6) können Sie den neuen Motorhersteller eingetragen oder einen vorhandenen Motorhersteller auswählen. Im Parameter (7) wird passend zum Motor eine neue Gruppe angelegt. Wenn Sie sich Struktur konform zur Motordatenbank verhalten wollen, benennen Sie die Gruppe nach der Nenndrehzahl des Motors. Im Parameter (8) tragen Sie die genaue Typbezeichnung des Motors ein. Überprüfen Sie die Eingaben und klicken Sie auf "Next" (10) um zum nächsten Menü zu gelangen.
3. Motorbasisdaten
Die Basisdaten werden in drei Kategorien "Basis" (1); “Temperatur" (2) und "Bremse" (3) eingeteilt.
Basis (1):
 | Beachten Sie unbedingt das max. zulässige du / dt der Motorwicklung! |
a) Anschlusstyp: Sternschaltung (Star Connection) oder Dreieckschaltung (Delta Connection). Wenn Sie den Motor in Stern- oder Dreieckschaltung verdrahten und betreiben, beachten Sie bitte, dass sich zusammen mit der Motornennspannung auch der Motornennstrom ändert und der AX5000 max. 480 V Nennspannung liefern kann. Die zulässigen Motorspannungen und -ströme bei Stern- oder Dreieckschaltung entnehmen Sie bitte der Motordokumentation / Typenschild.
b) Das Derating ist abhängig von Ihrer Applikation. Derating ist die Differenz zwischen wirksamen Kanalnennstrom und Motornennstrom in %. Beispiel: Motornennstrom = 4 A; wirksamer Kanalnennstrom = 3 A --> Derating = 25%.
c) Das Verhältnis von Ip zu In (Überlastfaktor) ist standardmäßig auf 1,5 eingestellt und muss anhand der Motordokumentation / Typenschild überprüft werden.
d) Der Nennstrom muss gemäß Anschlusstyp eingestellt werden und anhand der Motordokumentation / Typenschild überprüft werden.
e) Die max. Motordrehzahl ist abhängig von den mechanischen Eigenschaften und der max. Drehfeldfrequenz des AX5000. Bitte beachten Sie den M / f Verlauf und die Feldschwächung gemäß der Motordokumentation.
f) Die Nennspannung muss gemäß Anschlusstyp eingestellt werden und anhand der Motordokumentation / Typenschild überprüft werden.
g) Die Nenndrehzahl ist abhängig von der Polpaaranzahl und der Nennfrequenz und muss anhand der Motordokumentation / Typenschild überprüft werden.
h) Die Nennfrequenz ist standardmäßig auf 50 Hz eingestellt und muss anhand der Motordokumentation / Typenschild überprüft werden.
i) Der Leistungsfaktor (cos phi) ist standardmäßig auf 0,8 eingestellt und muss anhand der Motordokumentation / Typenschild überprüft werden.
Temperatur (2):
k) Der verwendete Typ der Motortemperaturüberwachung und der verwendete Eingang beim AX5000 müssen ausgewählt werden.
| Für weiterführende Informationen zu den von Ihnen eingesetzten Kombinationen, wenden Sie sich bitte an die Beckhoff Applikationsabteilung! |
m) Die Temperatur, bei der eine Warnung ausgegeben wird, ist auf 80 °C eingestellt. Dieser Parameter ist nur bei KTY-Sensoren wirksam.
n) Die Temperatur, bei der der Motor abgeschaltet wird, ist auf 140 °C eingestellt und muss anhand der Motordokumentation / Typenschild überprüft werden. Dieser Parameter ist nur bei KTY-Sensoren wirksam.
Bremse (3):
o) Der verwendete Typ der Motorbremse muss ausgewählt werden und anhand der Motordokumentation / Typenschild überprüft werden.
Überprüfen Sie noch einmal sämtliche Eingaben und klicken Sie auf "Next" (4) um zum nächsten Menü zu gelangen.
4. Zusammenfassung
In diesem Fenster werden die eingegebenen Motordaten und die daraus errechneten Daten angezeigt. Bitte prüfen Sie noch einmal ALLE Parameter auf Plausibilität und klicken Sie auf "OK" (5) um zum nächsten Menü zu gelangen.
5a. Standardspeicherordner für selbst generierte Motordatensätze
Der Standardspeicherordner für selbst erstellte Motordatensätze heißt "CustomerGenerated" (1) und der vorgeschlagene Dateiname (2) entspricht dem oben eingegebenen Motortyp (siehe "Charakteristische Motordaten"). Dieser Speicherordner hat den Vorteil, dass Sie auf einem Blick Ihre selbst erstellten Motordatensätze finden, allerdings werden sie in der obigen Liste unter 1. "Motorauswahl" nicht mit aufgeführt, sondern sind nur sichtbar, wenn Sie unter 1. "Motorauswahl" den Button "Load" rechts unten klicken. Der vorgeschlagene Name benennt nur die XML-Datei des Motordatensatzes. Zur Darstellung in den Listen wird das XML-File ausgelesen und die entsprechenden identifizierenden Motordaten ("Vendor", "Motor group" und "Motor type") werden als Auswahl aufgelistet.
Zum Speichern Ihrer Daten, klicken Sie auf "Speichern" (4), danach gelangen Sie zum letzten Menü.
Wenn Ihre selbst generierten Motordatensätze direkt in der obigen Liste unter 1. "Motorauswahl" aufgelistet werden sollen, klicken Sie auf das Symbol (3) um in den Ordner "MotorPool" zu kommen.
5b. Standardspeicherordner der Motordatensätze aus der Beckhoff- Motordatenbank
Der Standardspeicherordner für bereitgestellte Motordatensätze heißt "MotorPool" (4). Hier sind sämtliche Motordatensätze aus der Beckhoff Motordatenbank in Form von XML-Dateien, gespeichert. Wir empfehlen, den Dateinamen Ihres selbst generierten Motordatensatzes eindeutig zu vergeben, damit Sie ihn identifizieren können (5):
Kunde = Name Ihres Unternehmens
Mototec = Der von Ihnen vergebene Name (Vendor) unter 2. "Identifizierende Motordaten"
3000 = Die von Ihnen vergebene Motorgruppe (Motor group) unter 2. "Identifizierende Motordaten"
17K456FGH = Der von Ihnen vergebene Motortyp (Motor type) unter 2. "Identifizierende Motordaten"
Sie können selbstverständlich auch einen beliebigen Dateinamen vergeben. Der vergebene Name benennt nur die XML-Datei des Motordatensatzes. Zur Darstellung in den Listen wird das XML-File ausgelesen und die entsprechenden identifizierenden Motordaten ("Vendor", "Motor group" und "Motor type") werden als Auswahl aufgelistet.
Sie erzeugen pro Motordatensatz eine XML-Datei, in den XML-Dateien für Beckhoff Motordatensätze sind immer die Motoren derselben Motorgruppe eines Herstellers (Vendor) zusammengefasst.
Zum Sichern Ihrer Daten, klicken Sie auf "Speichern" (6), danach gelangen Sie zum vorhergehenden Menü.
6. Netzspannung und weitere Einstellungen
Dieses Fenster erscheint auch, wenn Sie einen vorhandenen Motordatensatz auswählen (Synchronmotor oder Asynchronmotor). Sie können die folgenden Eingaben jederzeit anpassen.
a) Sie können eine der vorgegebenen Netzspannungsvarianten auswählen oder eine eigene angeben.
b) Eingabe der Netzspannung (nur möglich wenn unter a) keine Netzvariante gewählt wurde).
c) Eingabe der oberen Toleranz der Netzspannung (nur möglich wenn unter a) keine Spannung gewählt wurde).
d) Eingabe der unteren Toleranz der Netzspannung (nur möglich wenn unter a) keine Spannung gewählt wurde).
e) + f) Die Phasenüberwachung ist nur bei 3-phasigem Versorgungsnetz sinnvoll. Phasenüberwachung ein- oder ausschalten (Nur möglich wenn unter a) keine Spannung gewählt wurde).
g) Mit dieser Einstellung aktivieren Sie die automatische Übergabe der Auflösung des Encoders und des Skalierungsfaktors vom AX5000 an die NC. (Nur erforderlich wenn dieser Motor über eine NC-Achse eingebunden wurde).
h) Die Zykluszeit des Stromreglers beträgt 125µs.
i) Auswahl des ASM-Anschlusstyps. Wenn Sie den Motordatensatz angelegt haben, können Sie nur den unter 3. "Motorbasisdaten - a)" eingetragenen Anschlusstyp auswählen. Wenn Beckhoff den Motordatensatz angelegt hat, können Sie zwischen Sternschaltung (Star Connection) oder Dreieckschaltung (Delta Connection) auswählen.
k) Auswahl des ASM-Steuerungs modus. Wenn Sie "U / f control" auswählen, können Sie den Motor nur gesteuert betreiben, der AX5000 verhält sich dann wie ein Servoverstärker. Wenn Sie "i-control with feedback" auswählen, können Sie den Motor geregelt betreiben, der Motor muss aber mit einem Feedbacksystem ausgestattet sein. Klicken Sie auf "OK" (1) um den Vorgang abzuschließen.
Gesteuert
Wenn Sie den Motor gesteuert betreiben wollen, können Sie mit folgenden Parametern Einfluss auf das Betriebsverhalten nehmen.
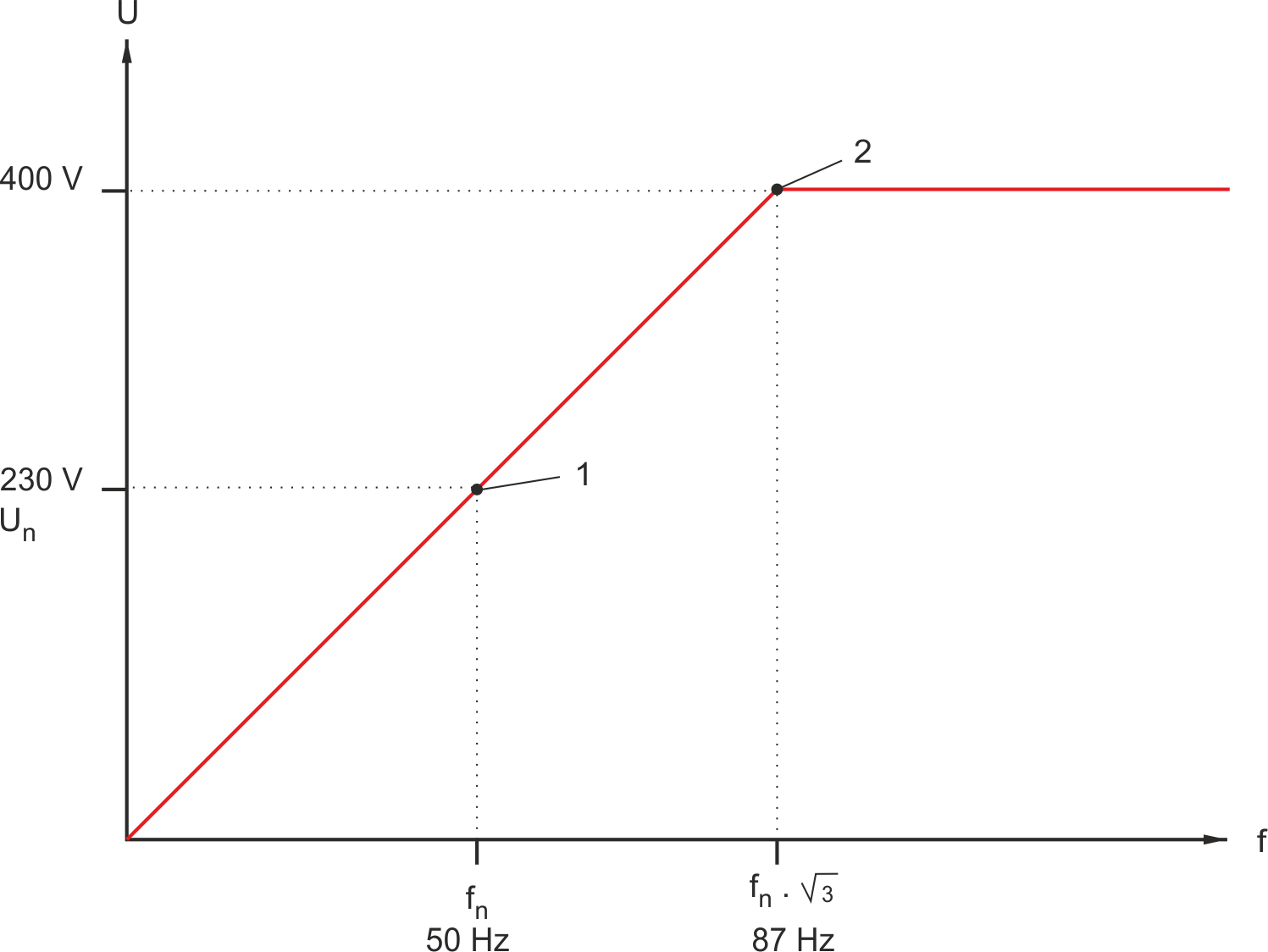
Abhängigkeit zwischen Anschlusstyp des Motors, Drehzahl und Nennausgangsstrom des AX5000
Beispielmotor:
Asynchronmotor mit 230 V Nennspannung, 6 A Nennstrom bei 50 Hz in Dreieckschaltung oder 400 V Nennspannung, 3,5 A Nennstrom bei 50 Hz in Sternschaltung
Sollte Ihre Applikation Drehzahlen oberhalb der Nenndrehzahl (1) fordern, so kann diese Anforderung realisiert werden, ohne einen größeren Motor einsetzen zu müssen:
Der AX5000 kann 400 V Kanalausgangsspannung bereitstellen und somit den Asynchronmotor in Dreieckschaltung bis 87 Hz (2) betreiben, ohne das eine Feldschwächung auftritt, das heißt mit Nenndrehmoment. Sie müssen nur beachten, dass ein Nennstrom von 6 A benötigt wird.
Boostspannung
Der Betrieb eines Asynchronmotors mit linearer U/f-Kennlinie bewirkt im unteren Drehzahlbereich aufgrund des dominierenden ohmschen Anteils eine Abschwächung des Drehmoments. Das Stillstandsmoment ist ohne Boostspannung Null. Ferner benötigt der Asynchronmotor nach dem Bestromen eine gewisse Zeit um das Magnetfeld am Rotor aufzubauen um damit die magnetische Kraft bzw. das Drehmoment zu erzeugen. Wenn ihre Applikation diesen Zeitverzug nicht tolerieren kann, besteht die Möglichkeit, über die sogenannte "Boostspannung", welche für eine "Vormagnetisierung" des Rotors sorgt, diesen Zeitverzug zu verkleinern. Mit der "Vormagnetisierung" wird im Rotor ein Magnetfeld erzeugt, obwohl sich der Rotor nicht bewegt. Bei einer Drehzahlsollwertvorgabe steht damit sofort Drehmoment zum Drehen der Rotorwelle zur Verfügung. Die Abhängigkeit zwischen Boostspannung, Drehzahl und Drehmoment ist anhand eines Beispielmotors in der unten stehenden Grafik dargestellt. Der Einfluss der Boostspannung auf auf das Drehmoment ist bei niedrigen Drehzahlen deutlich zu erkennen.
Beispielmotor:
Nenndrehzahl: 1410 min-1
Nennmoment: 10,2 Nm
Kippmoment: 28,6 Nm
Anzugsmoment: 25,5 Nm
Leistungsfaktor: 0,78
Wirkungsgrad: 0,79
Die Boostspannung wird in der IDN-P-0-0103 parametriert. Mit der Defaulteinstellung von 10 V wird der Hauptanteil der Applikationen abgedeckt.
Hinweis | |
Achtung Zerstörung des Motors Bei einem Asynchronmotor ohne Fremdlüfter ist bei Verwendung der Boostspannung die Motortemperatur im unteren Drehzahlbereich zu beobachten. Bei Bedarf können Sie die Boostspannung online verändern. |
Einstellungen für das Hoch- und Runterrampen
Beim gesteuerten Betrieb des Asynchronmotors ist es applikationsabhängig, welche Werte Sie für das Rampen einstellen müssen.
Das Hochrampen wird in der IDN S-0-0136 parametriert und das Runterrampen in der IDN S-0-0137.
Geregelt
Wenn Sie den Asynchronmotor geregelt betreiben wollen, müssen Sie das im Motor eingesetzte Feedbacksystem im TCDM auswählen.
Feedback
Starten Sie den TCDM und klicken Sie im Baum unter dem betreffenden Kanal (1) auf den Eintrag (2), im Arbeitsbereich des TCDM erscheint die Motor- / Feedbackkonfiguration. Klicken Sie auf das Feld "Feedback 1" (3) um zum "Feedbackauswahlfenster" zu kommen. Im "Feedbackauswahlfenster" können Sie sich alle verfügbaren Feedbacksysteme anzeigen lassen.
1a. Feedbackauswahl - Resolver
Sie können nur ein aufgelistetes Feedbacksystem auswählen. Entweder Sie wählen das Feedbacksystem eines vorhandenen Herstellers oder Sie wählen ein Standard-Feedbacksystem unter "Unknown" (1) aus. Wenn Ihr Motor mit einem Resolver ausgestattet ist, ermitteln Sie die generischen Kennwerte des Resolvers und wählen den passenden Resolvertyp (2) aus. Typische generische Kennwerte zur Klassifizierung von Resolvern sind Polanzahl "p" und Übersetzung "n". Klicken Sie auf "OK" (3) um den Vorgang abzuschließen.
1b. Feedbackauswahl - 1Vpp-Encoder
Sie können nur ein vorhandenes Feedbacksystem auswählen. Entweder Sie wählen das Feedbacksystem eines vorhandenen Herstellers oder Sie wählen ein Standard-Feedbacksystem unter "Unknown" (1) aus. Wenn Ihr Motor mit einem 1Vpp-Encoder ausgestattet ist, ermitteln Sie die Kennwerte des Feedbacksystems und wählen den passenden Encoder (2) aus. Typische Kennwerte zur Klassifizierung von 1Vpp-Encodern sind Strichanzahl "s" und Versorgungsspannung "5V oder 5Vfixed". Der Unterschied zwischen den beiden Spannungsvarianten besteht aus dem Einsatz einer Sense-Leitung (5V). Klicken Sie auf "OK" (3) um den Vorgang abzuschließen.
1c. Feedbackauswahl - TTL-Encoder
Sie können nur ein vorhandenes Feedbacksystem auswählen. Entweder Sie wählen das Feedbacksystem eines vorhandenen Herstellers oder Sie wählen ein Standard-Feedbacksystem unter "Unknown" (1) aus. Wenn Ihr Motor mit einem TTL-Encoder ausgestattet ist, ermitteln Sie die Kennwerte des Feedbacksystems und wählen den passenden TTL-Encoder (2) aus. Typische Kennwerte zur Klassifizierung von TTL-Encodern sind Strichanzahl "s" und Versorgungsspannung "5V oder 5Vfixed". Der Unterschied zwischen den beiden Spannungsvarianten besteht aus dem Einsatz einer Sense-Leitung (5V). Klicken Sie auf "OK" (3) um den Vorgang abzuschließen.
| TTL Encoder! Drahtbruchüberwachung für TTL Encoder wird nicht unterstützt! |
Kommutierung
Bei Asynchronmotoren wird das Rotormagnetfeld elektrisch mittels Rotorwicklungen erzeugt, welche vom Servoverstärker bedient werden. Aus diesem Grund wird weder ein teilabsolutes noch ein absolutes Gebersystem zur Kommutierung benötigt, auch wake & shake muss nicht angewendet werden. Das Statormagnetfeld induziert eine Spannung in den Rotorwicklungen. Dies führt zu einem Stromfluss in den Rotorwicklungen. Dadurch entsteht ein Magnetfeld, welches ein Drehmoment hervor ruft.