Bestimmung des mechanischen Kommutierungsoffsets
Für den mechanischen Kommutierungsoffset können mehrere Werte richtig sein. Die Anzahl der richtigen Werte ist abhängig von der Polpaarzahl des Motors.
Beispiel:
Bei einem Motor mit drei Polpaaren (sechs Pole) gibt es drei mögliche Werte für den mechanischen Kommutierungsoffset, die im Abstand von 120° zueinander liegen.
Komprimierte Vorgehensweise:
 | Adjustable commutation mechanical – Wert! Überprüfen Sie vor der Bestimmung des mechanischen Kommutierungsoffsets, ob der Wert des „Adjustable commutation mechanical“ in P-0-0-0150 auf 0 gesetzt ist. Wenn dies nicht der Fall ist, setzen Sie den Wert auf 0 und aktivieren Sie die TwinCAT Konfiguration. Dann führen Sie die im Folgenden beschriebenen Schritte aus. |
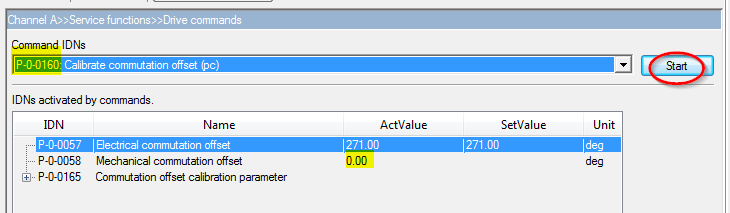
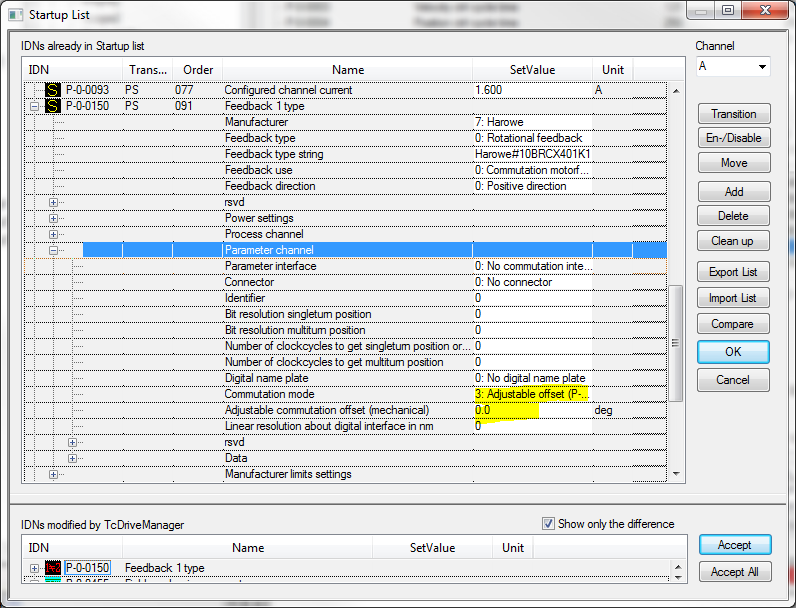
| 1.) Führen Sie das Kommando P-0-0160 aus. 2.) Drücken Sie die Knöpfe „Download“ und „Start“. Warten Sie bis die „Suceeded to start the command“ erscheint. 3.) Sie erhalten einen neuen Wert im Parameter P-0-0058 „Mechanical commutation offset“. Merken Sie sich diesen Wert. 4.) Öffnen Sie die „Startup List“. Öffnen Sie die Parameterstruktur P-0-0150. Öffnen Sie „Parameter Channel“: 5.) Setzen Sie den Parameter P-0-0150 „Feedback 1 Type“ im „Commutation mode“ auf: 3 Adjustable offset. |
| 6.) Ändern Sie den Wert im P-0-0150 „Feedback 1 Type“ im „Adjustable commutation offset (mechanical)“ auf den Wert, welchen Sie vorher im Parameter P-0-0058 ausgelesen haben. Bestätigen Sie mit OK und aktivieren Sie die Konfiguration im TwinCAT-System Manager. |
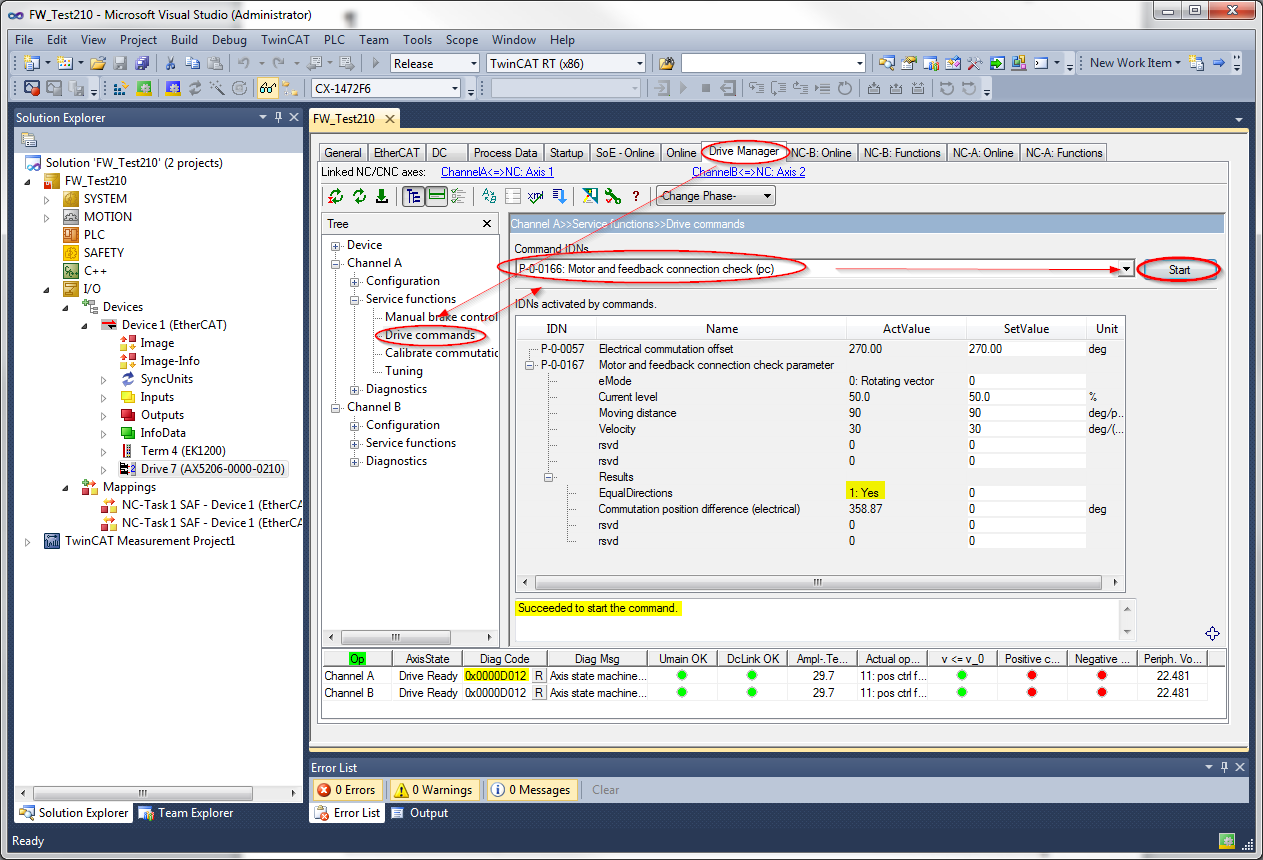
| 7.) Wechseln Sie auf den Reiter „Drive Commands“ und führen Sie das Kommando P-0-0166 „Motor and feedback connection check“ aus.
8.) Lassen Sie die Default-Werte stehen und bestätigen Sie mit Start. Wenn die Meldung „Suceeded to start the command“ erscheint, öffnen Sie die Parameterstruktur des P-0-0167 „Results“. „Equal direction“ muss dabei „Yes“ sein und „Commutation position difference“ muss zwischen 355° und 360° (0° … 5°) liegen.
|
| |
Bewegung des Motors! Wenn Sie das Kommando P-0-0160 oder P-0-0166 ausführen, führt der Motor eine Bewegung aus. Halten Sie daher, vor dem Start des Kommandos P-0-0160 oder P-0-0166 einen Sicherheitsabstand mit allen Körperteilen zum Motor ein. |
