Überprüfen der Drehrichtung
| Bitte beachten Sie, dass für einen ordnungsgemäßen Betrieb, die Zählrichtung des Feedback-Systems mit der Reihenfolge der Motorphasen übereinstimmen muss. Drehen Sie die Motorwelle, auf die A-Seite gesehen im Uhrzeigersinn. Der Parameter „Position feedback 1 value“ (siehe unteres Bild) sollte positiv zählen. Ist dies nicht der Fall, müssen die Sinus- und Cosinus-Signale am Motor getauscht werden. |
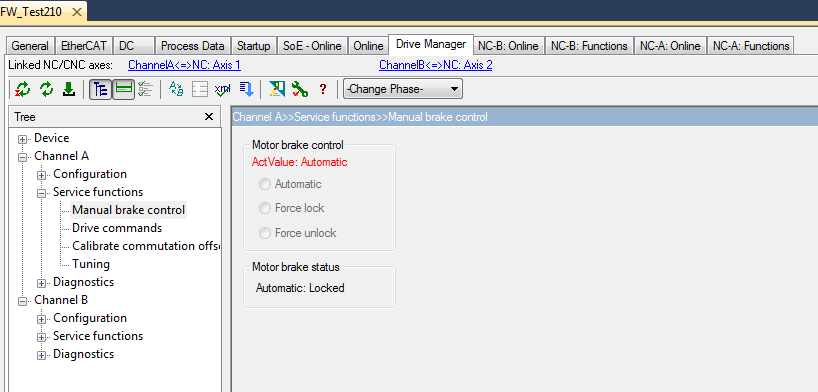
| Wenn der Motor eine Haltebremse hat, kann diese im TCDriveManager unter „Service functions/ Manual Operation“ gelöst werden (siehe unteres Bild).
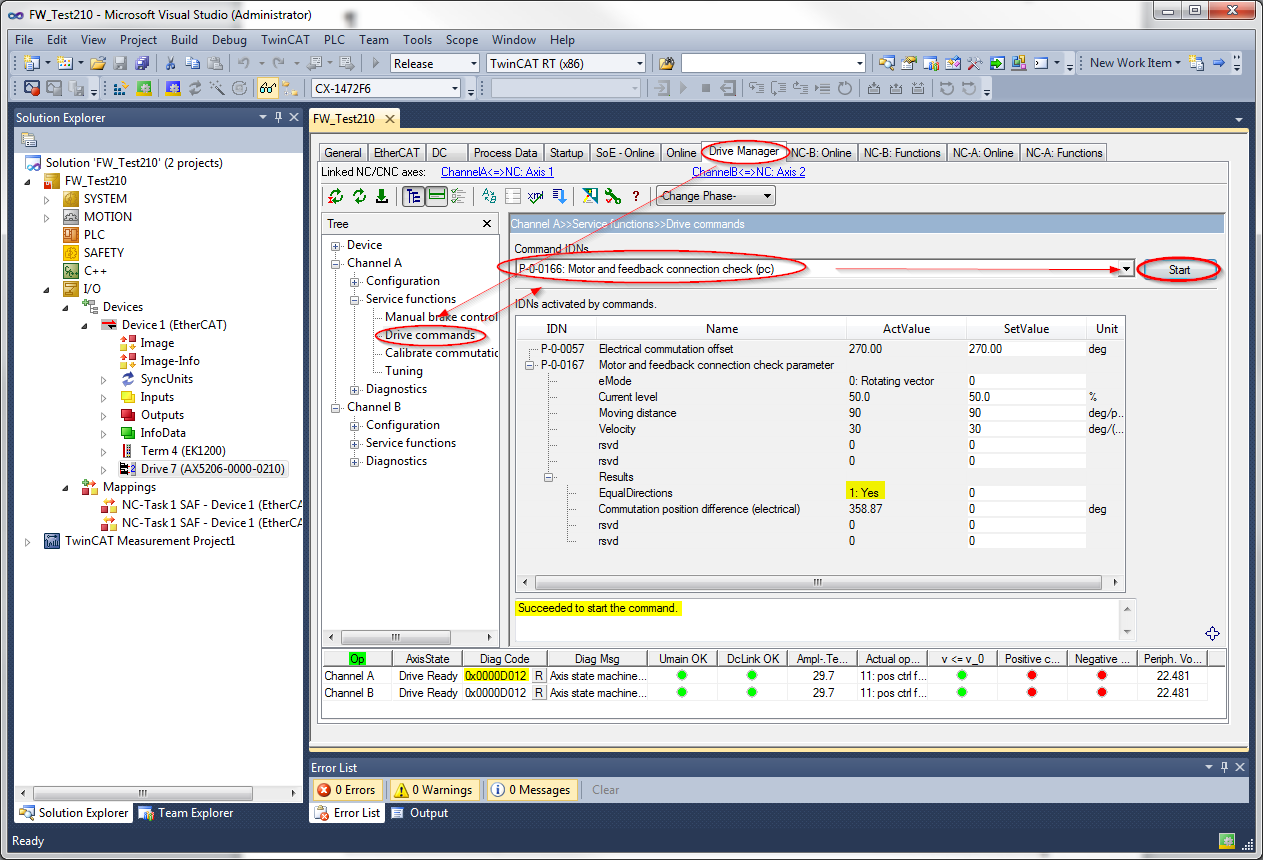
Überprüfen Sie nun mit dem Kommando P-0-0166, den Zählsinn des Feedback-Systems und ob dieser mit dem Anschluss der Motorphasen übereinstimmt.
|
| |
Bewegung des Motors! Wenn Sie den Zählsinn des Motors, anhand des Kommandos P-0-0166 überprüfen, führt der Motor eine Bewegung aus. Halten Sie daher, vor dem Start des Kommandos P-0-0166 einen Sicherheitsabstand mit allen Körperteilen zum Motor ein! |

| Der AX5000 muss ohne Fehler inaktiv gesetzt sein (Diag Code = 0x0000D012). Nach der Auswahl des Kommandos P-0-0166 drücken Sie „Start“. Bestätigen Sie die Auswahl (Do you really want to continue?) mit „Ja“.
Das Kommando P-0-0166 erfolgreich wurde erfolgreich abgeschlossen, sobald im Kontextmenü die Meldung „Suceeded to start the command“ erscheint. Im Parameter P-0-0167 können Sie nun das Ergebnis der Überprüfung auslesen. Wenn im Auswahlbereich „Equal Directions“ 0: No steht, ändern Sie die Reihenfolge der Motorphasen (Die Drehrichtung des Feedback-Systems wurde bereits im vorherigen Schritt überprüft und ggf. korrigiert). |
 | Bitte führen Sie die Änderung der Motorphasen am Motoranschluss und nicht in einer TwinCAT-Einstellung aus! Tauschen Sie bspw. die Phase U und V des Motors am Motoranschlussstecker (X13/X23). |
Wenn im Auswahlbereich „Equal Directions“ nun 1:Yes steht, kann der Kommutierungsoffset nach einer der folgenden Methoden bestimmt werden.