Überprüfen des Linear-Encoders
Wenn Motor und Feedback ausgewählt und der Skalierungsfaktor eingegeben wurde, muss die Konfiguration aktiviert werden. Anschließend ist das Messsystem zu überprüfen. Hierbei darf der AX5000 keinen Feedback-Error melden. Bitte beachten Sie hierzu die Hinweise im Kapitel: “Fehlersuche“.
Beobachten Sie die Position in der NC. Verschieben Sie während dieses Vorgangs den Motor von Hand. Die Distanz, um die der Motor verschoben wird, muss in der NC korrekt angezeigt werden.
Wird ein Messsystem verwendet, welches absolute und inkrementelle Signale auslesen kann, ist es erforderlich, dass die absolute und die inkrementelle Spur die gleiche Zählrichtung aufweisen. Beide Spuren müssen also vorher verglichen werden. Die Absolutposition wird vom AX5000 nur beim Einschalten / Neustart gelesen. Dann schaltet er um und wertet nur die inkrementelle Information (sincos- oder TTL-Signale) aus.
Wichtig: Bis zu diesem Schritt sollte an keiner Stelle die Zählrichtung über einen Parameter invertiert werden!
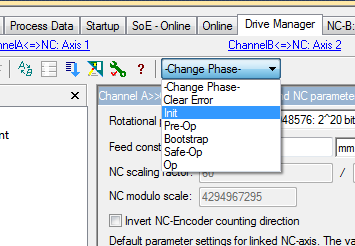
Verschieben Sie nun den Motor von Hand. Beobachten Sie dabei, in welche Richtung die Position ansteigt. Schalten Sie den AX5000 in den Zustand "Init" und dann in den Zustand "Op" (unteres Bild). Mit diesem Vorgang erreichen Sie das erneute Auslesen der Absolutposition.
Notieren Sie die ausgelesene Abolutposition. Verschieben Sie nun den Motor in Richtung der aufsteigenden Position. Jetzt schalten Sie den AX5000 erneut in den Zustand "Init" und dann in den Zustand "Op". Wird nach diesem Vorgang eine größere Aboslutposition als die vorher notierte angezeigt, zählen beide Spuren in dieselbe Richtung.
Wird eine kleinere Position angezeigt, muss der Zählsinn für die inkrementellen Encoder-Signale geändert werden. Dies sollte anhand der Hardware geschehen, bspw. durch das Tauschen der Signale SIN+ und REFSIN im Feedbackstecker.
Führen Sie nun erneut den Test durch!
 | Keine Übereinstimmung des Zählsinns mit der Applikation! Wenn der Zählsinn des Linear-Encoders nicht mit dem in der Applikation gewünschten Zählsinn übereinstimmt, sollte das an dieser Stelle noch nicht beachtet werden. Die nötigen Einstellungen können am Ende der Inbetriebnahme vorgenommen werden. Dies setzt voraus, dass der Motor fehlerfrei verfährt. |