Motor- und Feedback-Auswahl
Zuerst sollte der Motor, dann das Messsystem ausgewählt werden. Bei dieser Reihenfolge wird der Polpaarabstand des Linearmotors in den Feedback-Einstellungen des Parameters automatisch berücksichtigt.
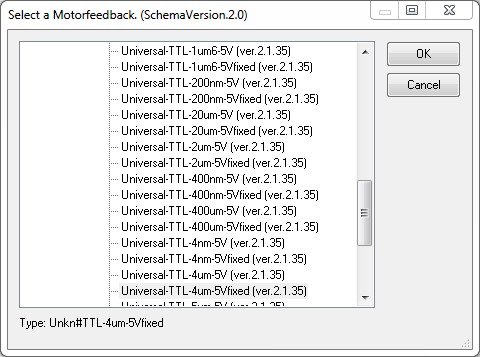
Bei Linear-Encodern mit TTL-Signalen muss zwischen der Signalperiode und der Auflösung unterschieden werden. Die Hersteller geben die Auflösung bei Auswertung aller Flanken an ("nach Vervierfachung"). Für den AX5000 muss die Signalperiode angegeben werden. Ein Messsystem, das vom Hersteller mit der Auflösung 1 µm angegeben wird, hat z.B. eine Signalperiode von 4 µm und muss entsprechend ausgewählt werden (unteres Bild):
Bei Motoren mit einem nicht ganzzahligen Polpaarabstand ergibt sich eine Besonderheit!
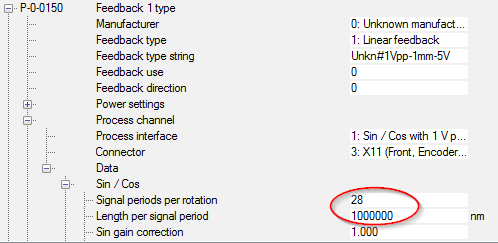
Im Parameter P-0-0150 ist die Angabe "Signal periods per rotation" erforderlich.
Beispiel:
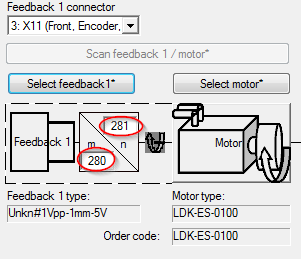
Bei einem Polpaarabstand von 28,1 mm und einer Sinusperiodenlänge des Linear-Encoders von 1 mm wäre ein Wert von 28,1 korrekt. Dort können aber nur ganzzahlige Werte eingetragen werden. Der Tc Drivemanager trägt deshalb im P-0-0150 den Wert 28 (unteres Bild) ein:
Nun wird automatisch das Feedback-Getriebe aktiviert, um den oben beschriebenen Fehler zu korrigieren (unteres Bild).