Überprüfung des Motoranschlusses und Feedback
Anhand des Kommandos P-0-0166 kann der Motor unabhängig vom Feedback eine definierte Bewegung ausführen. Wenn die Bewegung beobachtet wird, (bspw. mit dem Software-Oszilloskop), können u.a. Rückschlüsse auf die Feedback-Einstellungen getroffen werden.
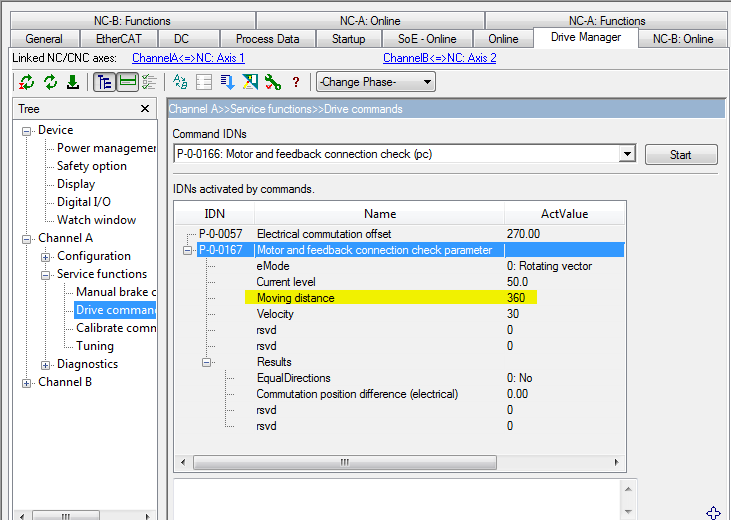
Tragen Sie im Parameter P-0-0167 in der Einstellung „Moving distance“ einen Wert von 360 deg. ein. Beim Ausführen von P-0-0166 wird sich der Motor dann um eine elektrische Umdrehung bewegen. Dies entspricht beim Linearmotor einem Polpaarabstand. Da der Motor vorher eine undefinierte Bewegung ausführt, ist es sinnvoll, die komplette Bewegung mit dem Softwareoszilloskop aufzuzeichnen.
Folgende Signale sollten aufgezeichnet werden:
- Torque Feedback (S-0-0084)
- Position feedback value 1 (S-0-0051)
- ActPos (aus der NC)
Sollte sich der Motor nicht um den erwarteten Polpaarabstand bewegen überprüfen Sie den eingetragenen Wert im Parameter P-0-0125 (Pole pair distance).
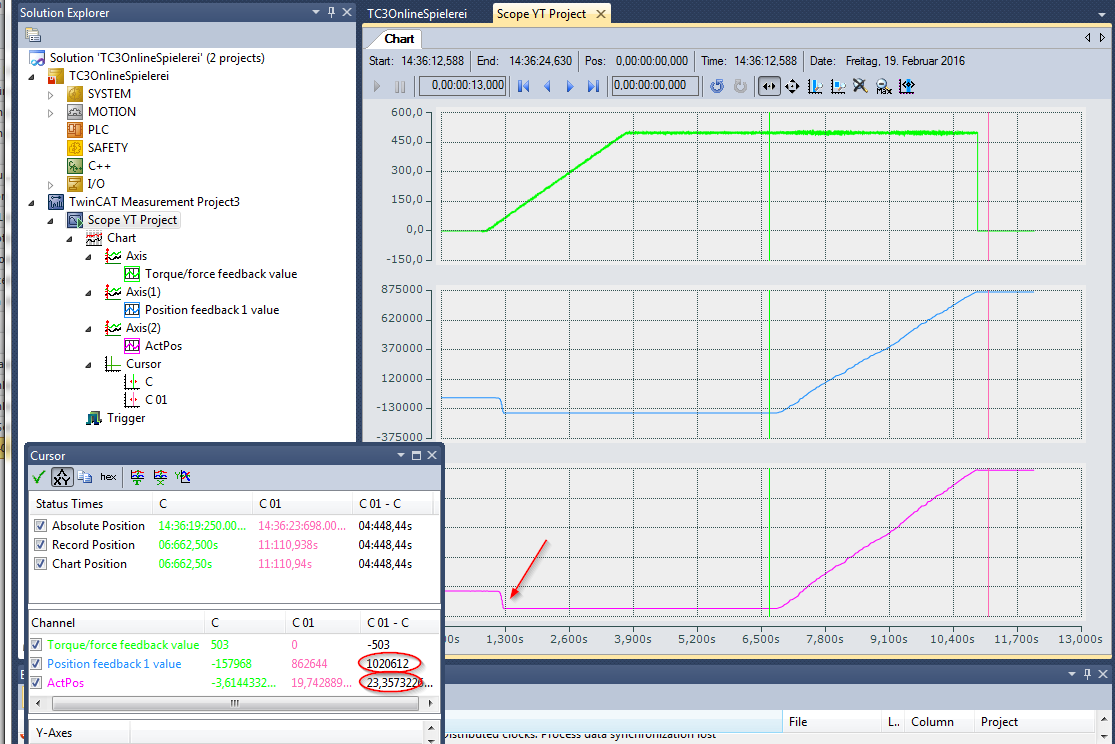
Das ruckartige Verfahren am Anfang (oberes Bild → roter Pfeil) geht nicht in die Betrachtung ein. Der Motor richtet sich dabei über den Polen aus.
Dem Stromverlauf ist zu entnehmen, dass der Wert zunächst hochgerampt und dann für einige Zeit konstant gehalten wird. Während dessen wird die Richtung elektrisch einmal gedreht. Der Wert der im Parameter S-0-0051 eingestellt wurde, sollte sich um ca. 220 (1048576) Inkremente erhöhen. Die NC-Position (ActPos) sollte um den Wert eines Polpaarabstandes steigen. Im Beispiel sind die Werte mit 1020612 und 23,357 ausreichend genau.
Wenn der Anstieg von S-0-0051 deutlich von 220 abweicht, ist die Auflösung des Linear-Encoders nicht korrekt eingegeben.
Wenn S-0-0051 richtig verläuft aber ActPos eine falsche Differenz anzeigt, ist der Skalierungsfaktor falsch eingestellt.
Wenn die Bewegung nicht gleichmäßig verläuft, sondern z.B. nur ein Sprung stattfindet, muss der Anschluss der Motorphasen überprüft werden.