Fehler F4A5 "SoE Communication Parameter Error"
Im Parameter S-0-0021 wird der Parameter ausgegeben, welcher den Fehler F4A5 verursacht hat (unteres Bild). Dieser kann im Fenster Diagnostics ausgelesen werden.
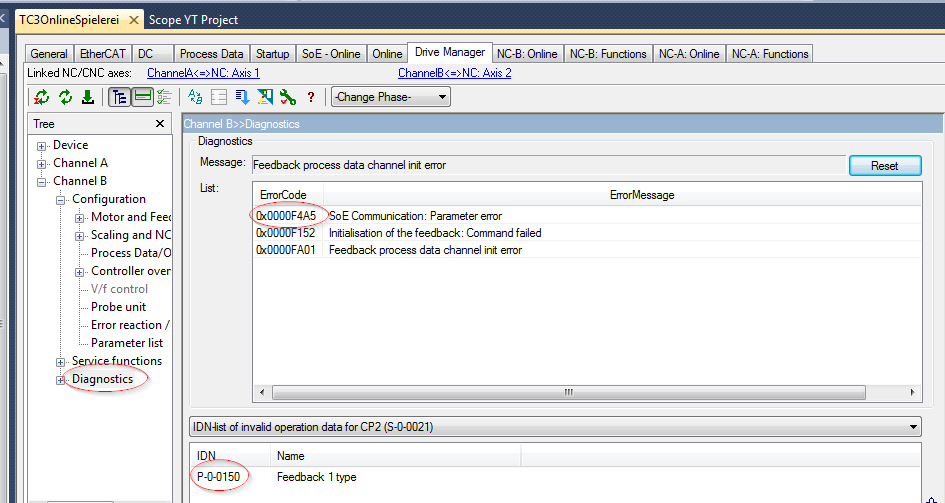
In diesem Fall sind F152 und FA01 Folgefehler des F4A5. Die Ursache des Fehlers ist eine Fehleinstellung im Parameter P-0-0150.
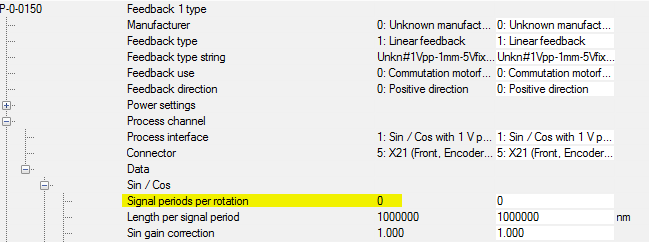
Für "Signal periods per rotation" (oberes Bild) muss der Wert >0 eingetragen werden. Dies geschieht automatisch wenn bei der Konfiguration zuerst der Motor und dann das Feedback ausgewählt werden.
Der richtige Wert ist der Polpaarabstand / ("Length per signal period")
Beispiel:
Signal periods per rotation = 24mm / 1000000nm = 24
Die Fehlermeldung F4A5 kann auch mit einem Hinweis auf den Parameter S-0-0113 "Maximum motor speed" auftreten:
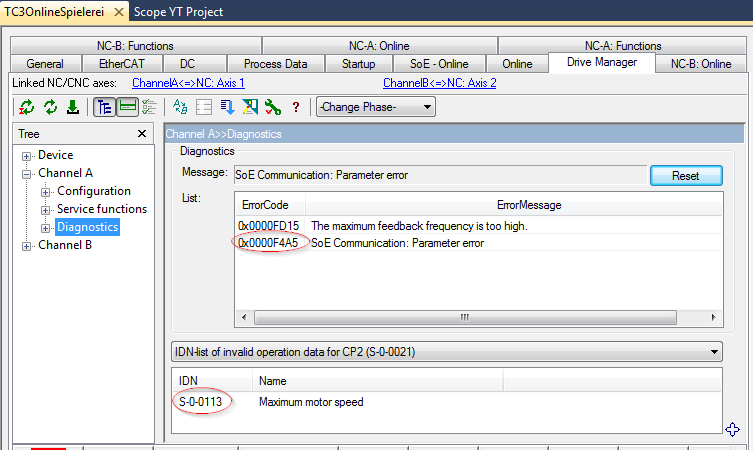
In diesem Fall gibt auch die zusätzlich auftretende Fehlermeldung FD15 Aufschluss über die Ursache: Mit dem gewählten Messsystem und der in S-0-0113 konfigurierten maximalen Geschwindigkeit ergibt sich am Encodereingang (X11/ X21) eine zu hohe Eingangsfrequenz.
Beispiel:
Messsystem mit 20µm Signalperiode. Maximale Verfahrgeschwindigkeit des Motors = 12m/s.
12 m/s : 20µm = 1000000 1/s = 1 MHz
Die max. zulässige Eingangsfrequenz für Sinus-/ Cosinussignale an X11/ X21 beträgt 250kHz.
Abhilfe: Reduzieren Sie den Wert von S-0-0113. In den wenigsten Anwendungen wird die maximal mögliche Geschwindigkeit des Motors benötigt.
Hinweis: In der Parameterliste wird der Wert der max. Geschwindigkeit in rpm (= 1/min) angezeigt. Beim Linearmotor ist 1rpm gleich ein Polpaarabstand pro Minute.

Umrechnung des angezeigten Wertes für einen Motor mit 24mm Polpaarabstand:
30000rpm * 0,024m / 60 = 12 m/s
 | Weiterführende Informationen finden Sie in den Parametern: S-0-0021 und P-0-0150. |