Aktivieren der Handsteuerung
TwinCAT besitzt ein Handmenü, mit dem Sie den Antrieb in einem Testbetrieb manuell starten können. Das Handmenü kann über den Antrieb (Devices) oder über die Achskonfiguration aufgerufen werden.
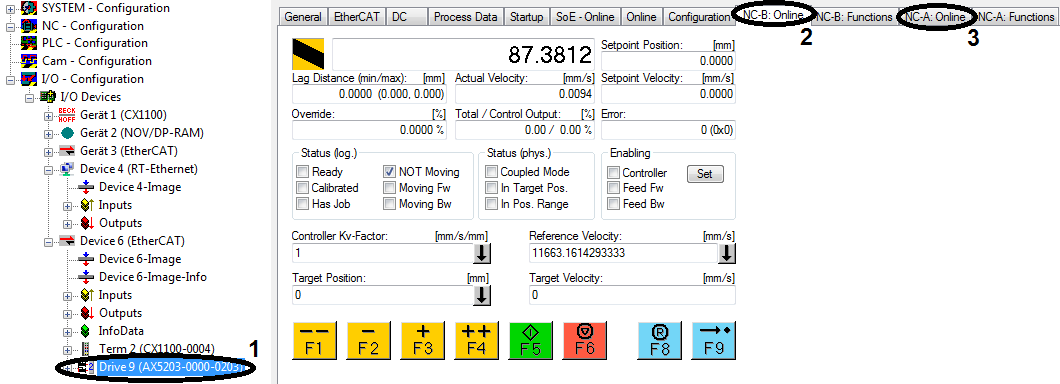
| Handmenü Antrieb Im System Manager I/O - Configuration → I/O Devices → Device 6 → Drive 9 (1) öffnen Zum Register NC-B: Online (2) oder NC-A: Online (3) wechseln |
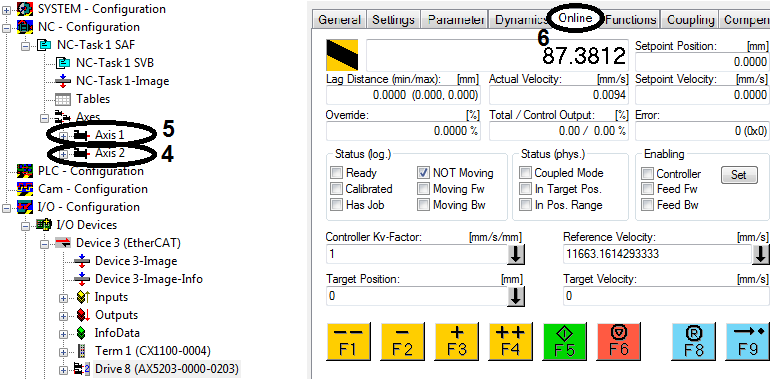
| Handmenü Achskonfiguration Im System Manager NC - Configuration → NC-Task 1 SAF → Axes → Axis 2 (4) oder Axis 1 (5) auswählen. Je nachdem welche der beiden Achsen getestet werden soll. Zum Register Online (6) wechseln |
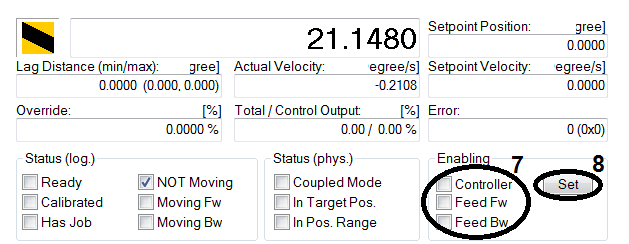
| Setzen der Antriebsfreigaben Um die Motoren manuell zu bedienen, muss die Handsteuerung des Antriebs aktiviert sein. Die Steuerung ist aktiviert, wenn Enabling Controller* (7) aktiv ist. Zusätzlich benötigt der Antrieb zum Vorwärtsfahren die Freigabe für Enabling Feed Fw** (7) und zum Rückwärtsfahren die Freigabe Enabling Feed Bw (7). Schaltfläche Set (8) betätigen, um die Freigaben zu ändern |
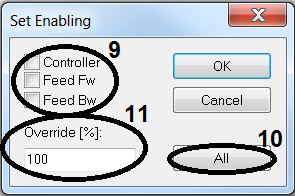
| Schaltfläche All (10) betätigen, um alle Freigaben und den Override (11) auf 100 % zu setzen Die Freigaben einzeln (9) erteilen, indem Sie diese durch einen Haken aktivieren Den Override (11) Wert eintragen |
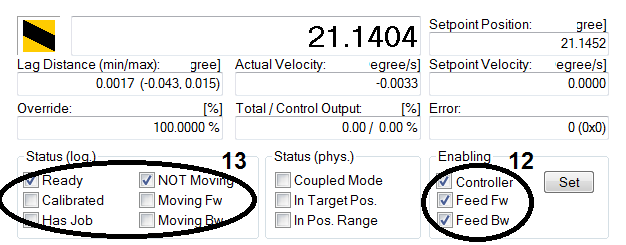
| In der Funktionsansicht werden die Freigaben durch Häkchen gekennzeichnet (12). Zusätzlich hat sich mit der Steuerungsfreigabe der Status (log.) (13) verändert und der Override ist eingetragen. Der Antrieb ist betriebsbereit und kann mit dem Handmenü angesteuert werden. |
*Wenn dieses Flag gesetzt wird, wird versucht, die Regelung des Antriebs (des AX5000) zu aktivieren und den Antrieb in den Zustand zu versetzen, dass er den Sollwertvorgaben der NC folgt. Wenn diese Anforderung erfolgreich vom Antrieb bestätigt wird, wird das "Ready" Flag gesetzt.
**Diese sogenannten Richtungsfreigaben erlauben es, dass die NC Fahraufträge in die jeweile Richtung akzeptiert. Von diesen beiden Flags sieht der Antrieb nichts!