Motortypen und Betriebsarten
In diesem Kapitel werden die Zusammenhänge zwischen physikalischen Motortypen, Feedback-Systemen und der dafür erforderlichen Betriebsart erläutert.
Funktionalität ab der Firmware v2.12
Die Firmware v2.12 erlaubt den Betrieb von Voice Coil-Motoren mit Feedback-System und (A)Synchron-Servomotoren mit und ohne Feedback (sensorlose Regelung).
Aufbau des Parameters P-0-0050 (Motor construction type)

In diesem Parameter wird das Motor-Funktionsprinzip
((A)-/Synchron), sowie die Konstruktionsart (rotatorisch/linear) festgelegt.
Aufbau des Parameters P-0-0451 (Current controller settings)
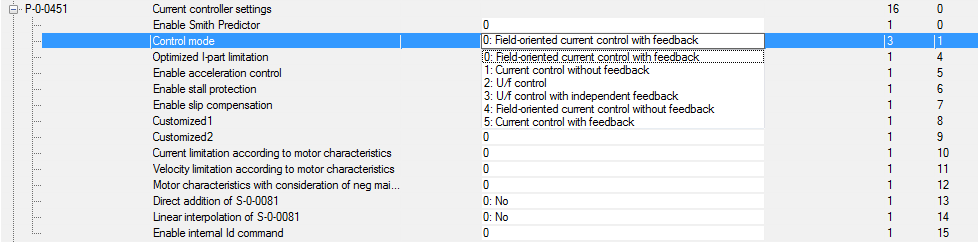
Im Control mode wird die Betriebsart in Abhängigkeit des vorher bestimmten
Motortyps (P-0-0050)
ausgewählt.
Die Zusammenhänge
entnehmen Sie bitte der
unten stehenden Tabelle.
Zusammenhänge zwischen Motortyp und Betriebsart
Fall | Motortyp | Einstellungen im P-0-0050 | Einstellungen im P-0-0451 |
|---|---|---|---|
1 | Rot. Synchron-Servomotor mit Feedback | Functional principle = 0: synchronous Construction = 0: rotary Functional principle replacement = 0 (Default) | Control mode = 0: Field-oriented current control with feedback |
2 | Lin. Synchron-Servomotor mit Feedback | Functional principle = 0: synchronous Construction = 1: linear Functional principle replacement = 0 (Default) | Control mode = 0: Field-oriented current control with feedback |
31) | Rot. Synchron-Servomotor ohne Feedback | Functional principle = 0: synchronous Construction = 0: rotary Functional principle replacement = 0 (Default) | Control mode = 4: Field-oriented current control without feedback |
4 | Rot. Asynchron-Servomotor mit Feedback | Functional principle = 1: asynchronous Construction = 0: rotary Functional principle replacement = 0 (Default) | Control mode = 0: Field-oriented current control with feedback |
52) | Rot. Asynchron-Servomotor ohne Feedback | Functional principle = 1: asynchronous Construction = 0: rotary Functional principle replacement = 0 (Default) | Control mode = 2: U/f control oder Control mode = 3: U/f control with independent feedback |
63) | Rot. Voice Coil-Servomotor mit Feedback | Functional principle = 0: synchronous Construction = 0: rotary Functional principle replacement = 1: VoiceCoil | Control mode = 5: Current control with feedback |
73) | Lin. Voice Coil-Servomotor mit Feedback | Functional principle = 0: synchronous Construction = 1: linear Functional principle replacement = 1: VoiceCoil | Control mode = 5: Current control with feedback |
1): Zwingend erforderliche Einstellung im Parameter P-0-0464 = Mode: 1: EMF-based observer.
2): Bei einem Asynchron-Servomotor und der Betriebsart U/f control with independent feedback (Einstellung im P-0-0451) kann zusätzlich ein unabhängiger Encoder eingelesen werden. Ein Encoderfehler beeinträchtigt nicht den Betrieb des Motors.
3): Sobald Sie einen Voice Coil-Motor im Parameter P-0-0050 auswählen, wird der Bereich im Functional principle (syncronous / asynchronous) überschrieben.
Funktionalität ab der Firmware v2.06 bis zur Firmware v2.10
Die Firmware-Versionen v2.06 – v2.10 erlauben den Betrieb von Synchron-Servomotoren mit Feedback und Asynchron-Servomotoren ohne Feedback.
Aufbau des Parameters P-0-0050 (Motor construction type)

In diesem Parameter wird das Motor-Funktionsprinzip
((A)-/Synchron), sowie die Konstruktionsart (rotatorisch/linear) festgelegt.
Aufbau des Parameters P-0-0451 (Current controller settings)
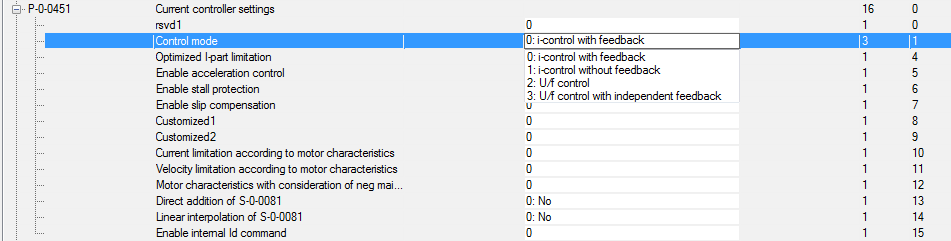
Im Control mode wird die Betriebsart in Abhängigkeit des vorher bestimmten
Motortyps (P-0-0050)
ausgewählt.
Die Zusammenhänge
entnehmen Sie bitte der
unten stehenden Tabelle.
Zusammenhänge zwischen Motortyp und Betriebsart
Fall | Motortyp | Einstellungen im P-0-0050 | Einstellungen im P-0-0451 |
|---|---|---|---|
1 | Rot. Synchron-Servomotor mit Feedback | Functional principle = 0: synchronous Construction = 0: rotary Functional principle replacement = 0 (Default) | Control mode = 0: Field-oriented current control with feedback |
2 | Lin. Synchron-Servomotor mit Feedback | Functional principle = 0: synchronous Construction = 1: linear Functional principle replacement = 0 (Default) | Control mode = 0: Field-oriented current control with feedback |
3 | Rot. Asynchron-Servomotor ohne Feedback | Functional principle = 1: asynchronous Construction = 0: rotary Functional principle replacement = 0 (Default) | Control mode = 2: U/f control oder Control mode = 3: U/f control with independent feedback |
4 | Rot. Asynchron-Servomotor ohne Feedback | Functional principle = 0: synchronous Construction = 0: rotary Functional principle replacement = 0 (Default) | Control mode = 4: Field-oriented current control without feedback |
5 | Rot. Asynchron-Servomotor mit Feedback | Functional principle = 1: asynchronous Construction = 0: rotary Functional principle replacement = 0 (Default) | Control mode = 0: Field-oriented current control with feedback |