Beschleunigungsvorsteuerung
Mit Hilfe der Beschleunigungsvorsteuerung kann der Schleppfehler einer Achse während der Beschleunigung minimiert werden. Das kann z.B. bei Handlings-Achsen die Taktzeiten verkürzen oder bei CNC-Achsen die Bahntreue verbessern.
Die Bedeutung der Parameter im Zusammenhang mit der Beschleunigungsvorsteuerung wird in den folgenden Kapiteln erläutert.
 | Bezugsgrößen der Beschleunigungsvorsteuerung P-0-0010, P-0-0071, P-0-0505, P-0-0556, S-0-0348 |
Voraussetzungen
Die Beschleunigungsvorsteuerung kann nur genutzt werden, wenn der AX5000 in der Betriebsart
- 11: position control feedback 1 lag less
oder
- 12: position control feedback 2 lag less betrieben wird.
Der AX5000 bekommt zyklisch (z.B. alle 2 ms), einen neuen Positionssollwert und interpoliert zwischen den neuen Sollwerten mit der Zykluszeit des Lagereglers (Default-Wert 250 µs).
Die Beschleunigung ergibt sich aus der zweiten Ableitung der Position. Bei linearer Interpolation der Sollwerte ist der Wert der zweiten Ableitung immer Null.
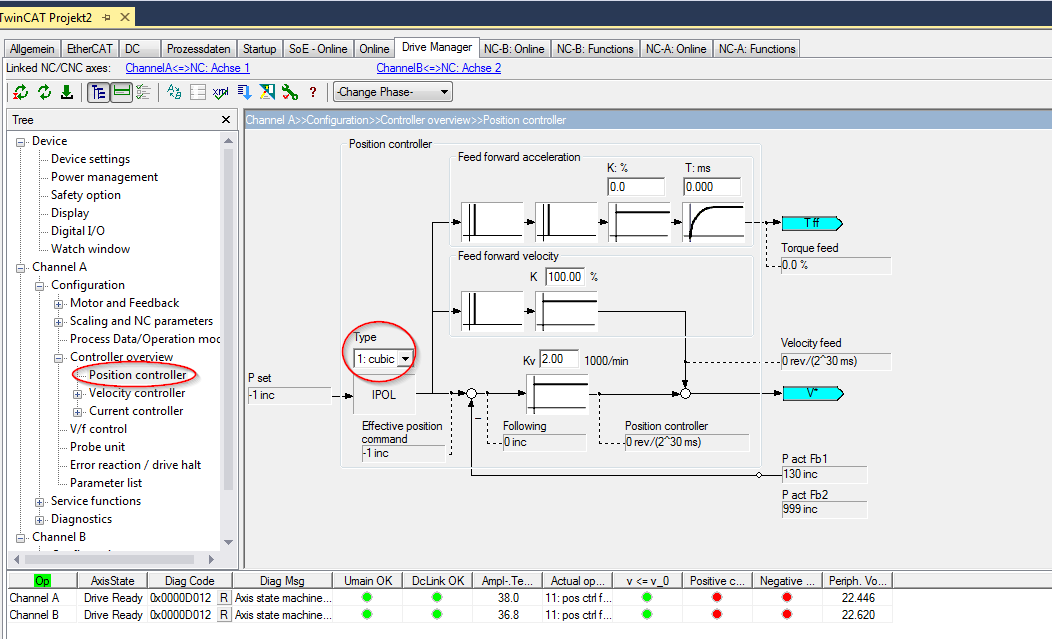
Deshalb muss im AX5000 die kubische Interpolation eingestellt werden (P-0-0556).
Wenn die kubische Interpolation aktiv ist, darf die Zykluszeit des Lagereglers im AX5000 (P-0-0004) nicht kleiner 250 µs gewählt werden, sonst erscheint eine Fehlermeldung (F330).
Die Beschleunigungsvorsteuerung sollte nach Möglichkeit mit einer Firmwareversion ≥ FW v2.10 build 8 eingesetzt werden. Die Funktion wurde schon in früheren Versionen implementiert aber nicht mit der hier beschriebenen Funktionalität.
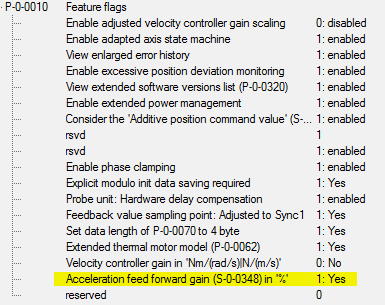
Im Parameter P-0-0010, "Feature Flags", muss das zugehörige Bit aktiviert werden, damit die Skalierung der Vorsteuerung in % erfolgt:
Aus der Beschleunigung wird abhängig vom Motor und den Lastverhältnissen ein Stromwert berechnet. Dafür ist es wichtig, dass im Parameter P-0-0071 die korrekten Werte für die Massenträgheit des Motors und der Last eingetragen sind:
Die Massenträgheit des Motors wird bei der Konfiguration automatisch aus dem elektronischen Typenschild eingelesen.

Wenn der genaue Wert der Lastträgheit nicht bekannt ist, sollte er abgeschätzt werden. Bei den meisten Servo-Anwendungen hat das Verhältnis von Lastträgheit zu Motorträgheit einen Wert zwischen 3 und 10.
Vorgehensweise
Optimieren Sie die Achse zunächst mit der linearen Interpolation. Zeichnen Sie dazu Strom, Drehzahlsoll- und -istwerte und den Schleppfehler mit dem Oszilloskop auf.
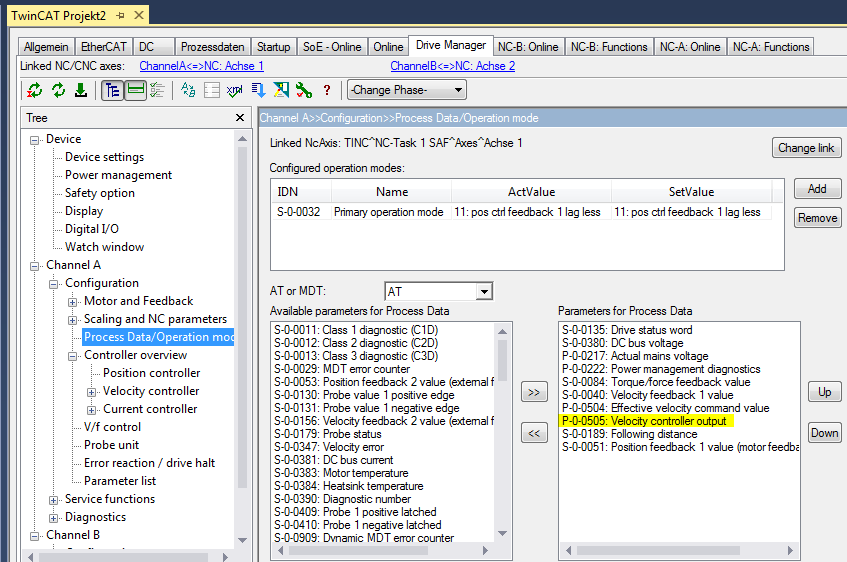
Dann aktivieren Sie die kubische Interpolation wie oben gezeigt und fügen den Parameter P-0-0505 zu den Prozessdaten hinzu:
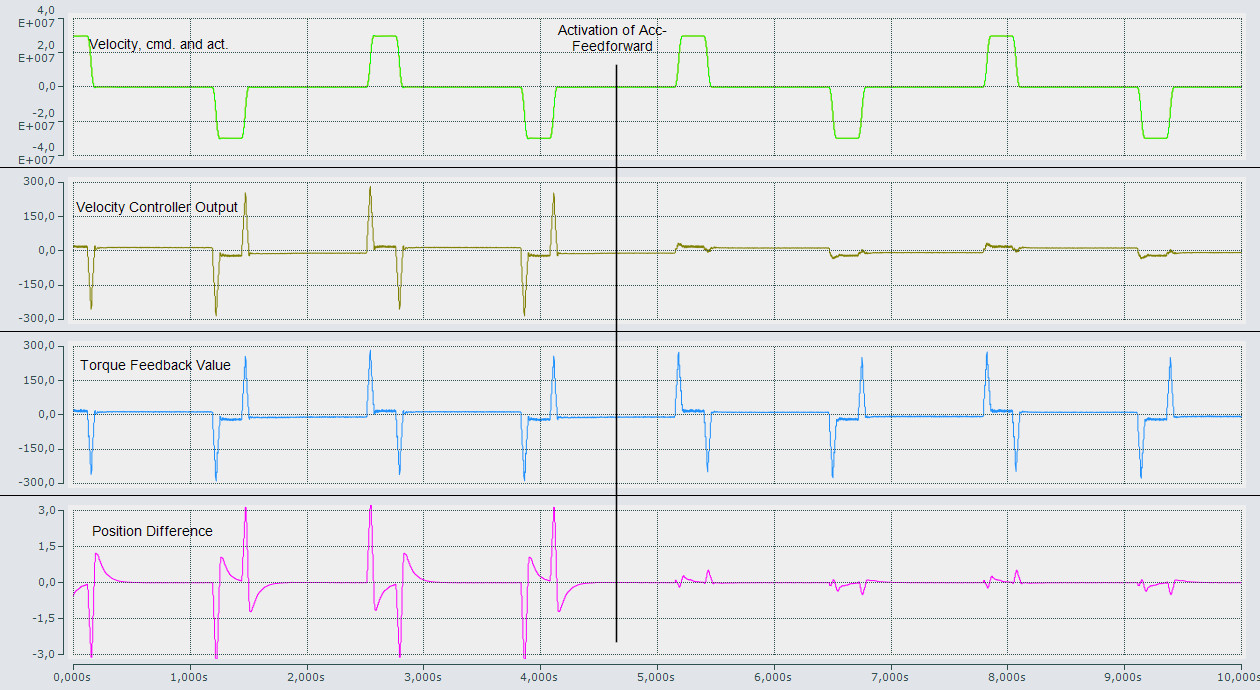
Wenn Sie mit dem Oszilloskop den Wert des "velocity controller output" aufzeichnen, erhalten Sie ein Bild ähnlich wie das hier dargestellte:
Der Wert des "velocity controller output" (P-0-0505) ist während der Beschleunigungs- und Bremsphase am größten.
Im zweiten Teil des Bildes ist die Beschleunigungsvorsteuerung aktiv. Dadurch wird der Drehzahlregler entlastet und der Wert des "velocity controller output" reduziert.
Gleichzeitig wird der Schleppfehler kleiner.
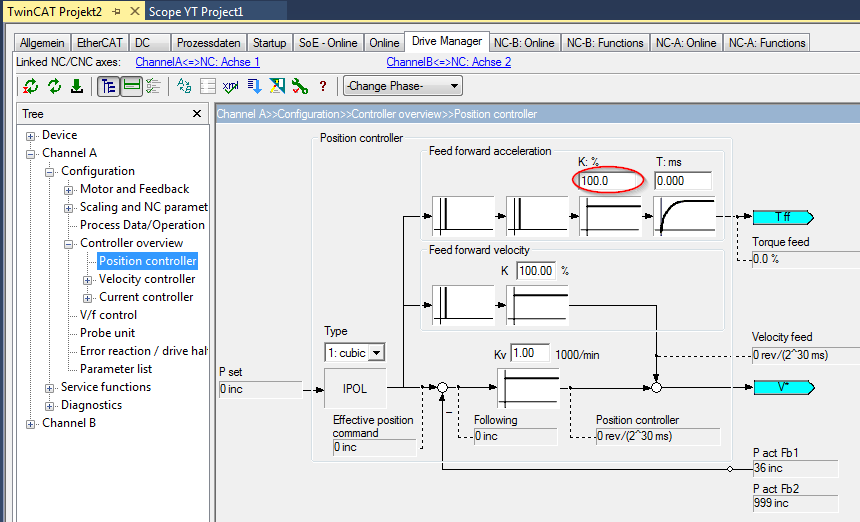
Bei korrekt eingestellter Massenträgheit ist im Normalfall ein Wert von 100% optimal für die Beschleunigungsvorsteuerung
(S-0-0038, “acceleration feedforward gain“):
Mit Hilfe der Oszilloskop Aufzeichnung kann das überprüft und der Wert bei Bedarf korrigiert werden.
Das Kriterium dafür ist die Größe des Schleppfehlers und evtl. der Wert des "velocity controller output".