Inbetriebnahme
| |
Gefahr durch unkontrollierte Motorbewegungen Bei der Erstinbetriebnahme eines Fremdmotors kann es passieren, dass der Motor unkontrollierte Bewegungen ausführt.
|

Überprüfen der Positionsanzeige
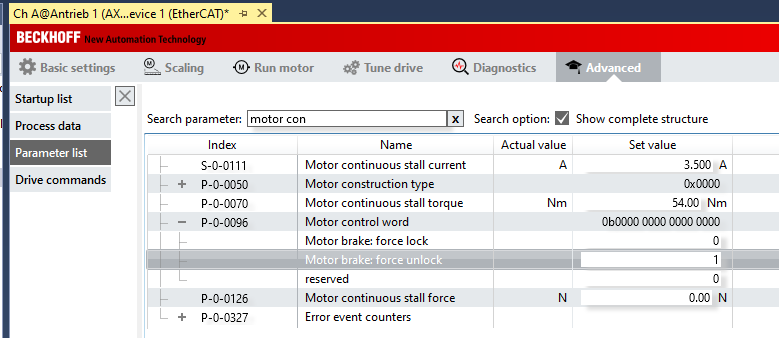
Falls Sie die Motorwelle von Hand drehen können, überprüfen Sie, ob dabei sinnvolle Positionswerte angezeigt werden. Eine mögliche Bremse kann mit Hilfe des Parameters P-0-096, „Motor control word“ gelöst werden. Setzen Sie „Motor brake: force unlock“ auf den Wert „1“.
 | Ändern Sie zunächst noch keine Drehrichtung per Parameter, weder bei den Feedback-Einstellungen noch für die NC-Achse! Die Zuordnung der Zählrichtung zur Applikation erfolgt erst am Schluss der Inbetriebnahme. |
Überprüfen der Drehrichtung
Mit dem Kommando P-0-0166 können Sie überprüfen, ob der Anschluss der Motorphasen zum Zählsinn des Feedback-Systems passt.
| |
Gefahr durch unkontrollierte Motorbewegungen Bei der Ausführung des Kommandos führt der Motor eine Bewegung aus!
|
Wählen Sie im Drive Manager den Reiter „Advanced“ [1], dann „Drive commands“ [2]. Aus der Liste der Kommandos wählen Sie „P-0-0166: Motor and feedback connection check“ [3] und öffnen im Parameter P-0-0167, der darunter angezeigt wird, den Eintrag „Results“ [4].
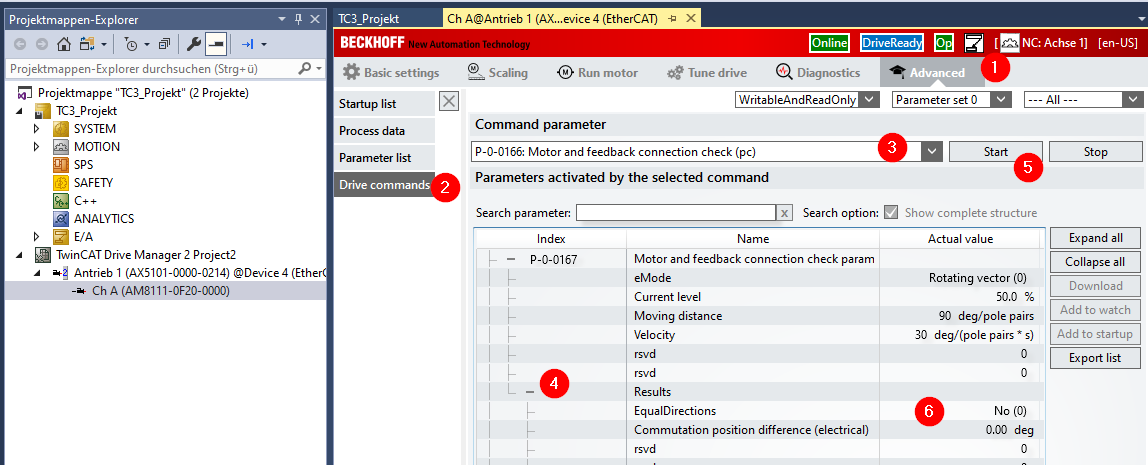
Mit dem Klick auf Start [5] starten Sie die Ausführung. Beim ersten Mal nach einem Neustart werden Sie gefragt:
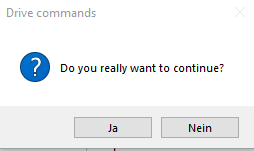
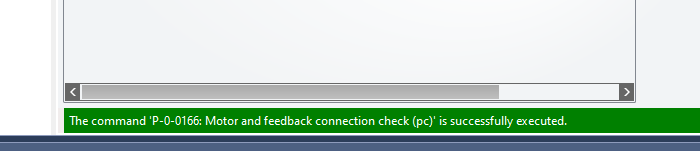
Fahren Sie mit „Ja“ fort. Unter dem Parameterfenster informiert eine Statuszeile über die Ausführung des Kommandos:
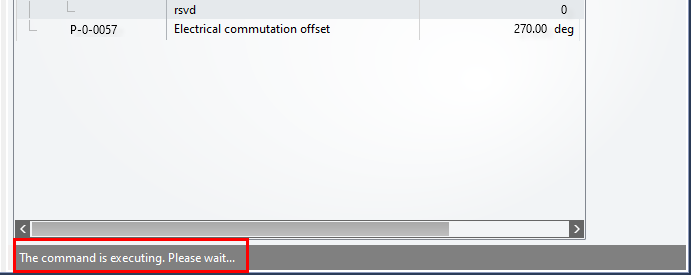
Wenn möglich beobachten Sie den Motor, um zu bestätigen, dass sich die Welle bewegt. Nach erfolgreicher Ausführung des Kommandos erscheint in der Statuszeile:
Überprüfen Sie jetzt in „P-0-0167 / Results“ den Eintrag „Equal directions“ (s.o. [6]). Wenn dort „Yes“ eingetragen wurde, passt der Zählsinn des Feedback-Systems zur Anschlussreihenfolge der Motorphasen. Wenn dort „No“ steht, muss entweder der Zählsinn des Feedbacks oder die Reihenfolge der Motorphasen geändert werden.
Wir empfehlen, das Kommando P-0-0166 mehrfach auszuführen und den Motor dabei zu beobachten. Erst wenn sichergestellt ist, dass sich der Motor bewegt und das Ergebnis reproduzierbar ist, sollten nötige Änderungen ausgeführt bzw. die Inbetriebnahme fortgesetzt werden.
Wenn das Feedback so zählt, wie oben beschrieben (positiv im Uhrzeigersinn), empfiehlt es sich beim Ergebnis „No“, am Motoranschlussstecker X13 / X23 z.B. die Anschlüsse für die Phasen U und V zu tauschen.
| |
Gefahr durch unter Spannung stehende Bauteile Unter Spannung stehende Bauteile können beim Phasentausch mit dem Werkzeug in Berührung kommen. In der Folge kann dies zu schweren bis tödlichen Verletzungen führen.
|
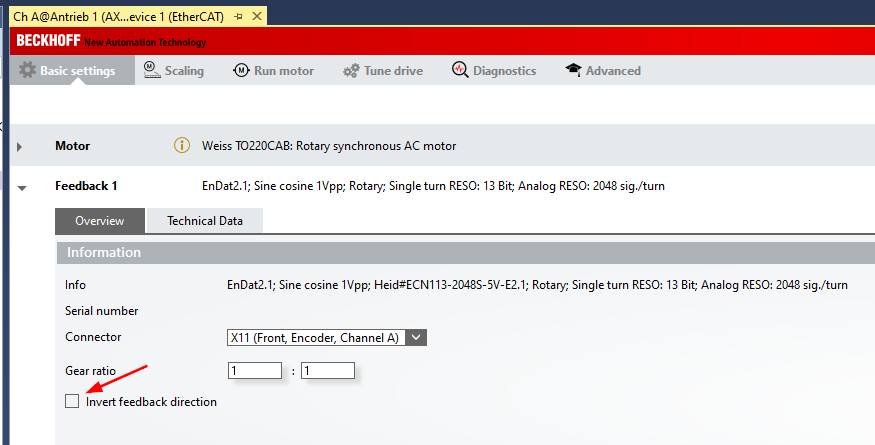
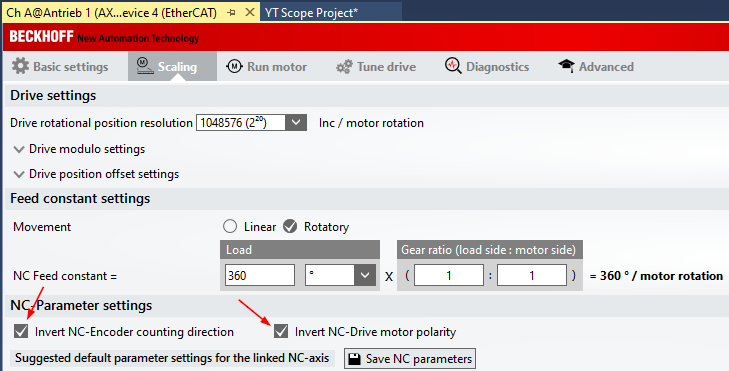
Die Zählrichtung des Feedbacks kann im Parameter P-0-0150 geändert werden. Unter „Basic Settings / Feedback 1“ erlaubt der Drive Manager diese Änderung mit der Checkbox „Invert feedback direction“:
Bestimmung des elektrischen Kommutierungsoffsets
Die Bestimmung des elektrischen Kommutierungsoffsets erfolgt ebenfalls mit Hilfe des Kommandos P-0-0166. Starten Sie das Kommando erneut, stellen Sie sicher, dass unter „P-0-0167 / Results“ bei „Equal directions“ wieder „Yes“ angezeigt wird [1] und lesen Sie den Wert für „Commutation position difference (electrical)“ aus [2]:
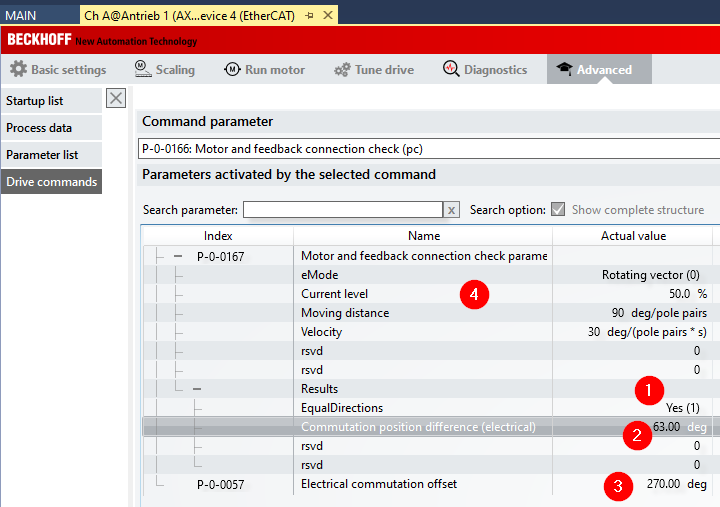
Ziehen Sie ihn vom Wert in „P-0-0057 / Electrical commutation offset“ [3] ab. Das Ergebnis ist der neue Wert für „Electrical commutation offset“.
Beispiel: Electrical commutation offset (neu) = 270° - 63° = 207°.
Wenn das Ergebnis der Subtraktion < 0 ist, addieren Sie 360°, um einen Wert zwischen 0° und 360° zu erhalten.
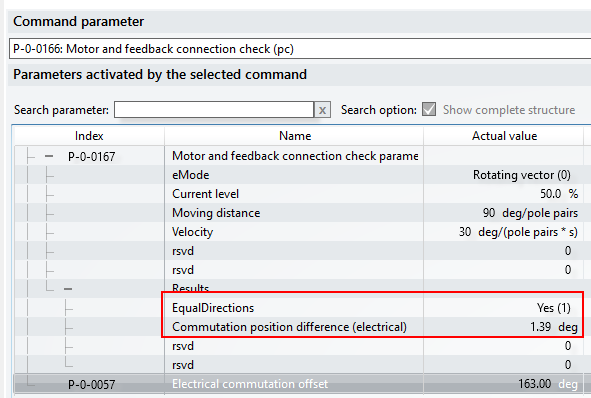
Nachdem Sie den neuen Wert eingetragen haben, starten Sie wieder das Kommando P-0-0166. Nach erfolgreicher Ausführung sollte der Wert für „P-0-0167 / Results / Commutation position difference“ im Bereich 350…360° oder 0…10° liegen.
Es ist sinnvoll, das Kommando mehrfach auszuführen und den Offset ggf. zu korrigieren. Bei schwergängigen Achsen kann das Erhöhen des Stroms für die Ausführung in „P-0-0167 / Current level“ (s.o. [4]) für zuverlässigere Ergebnisse sorgen.
Für möglichst verlässliche Ergebnisse sollten diese Ermittlungen ohne Last an der Motorwelle ausgeführt werden.
Konfiguration der Wake & Shake Routine
Wenn der Motor mit einem inkrementellen Encoder ausgestattet ist, muss der Kommutierungsoffset nach jedem Neustart des AX5000 neu ermittelt werden. Das geschieht mit Hilfe der Wake & Shake Routine. Voraussetzung dafür, dass die Routine funktionieren kann, ist das Übereinstimmen der Motorphasen mit der Zählrichtung des Encoders, wie oben beschrieben. Details zum Ablauf der Kommutierungsfindung mit „Wake & Shake“ können Sie im Beckhoff Information System unter dem Stichwort: „Elektronische Kommutierung“ nachlesen.
Das Kommando P-0-0160 führt die Routine aus. Die Art der Ausführung stellen Sie im Parameter P-0-0165 ein:
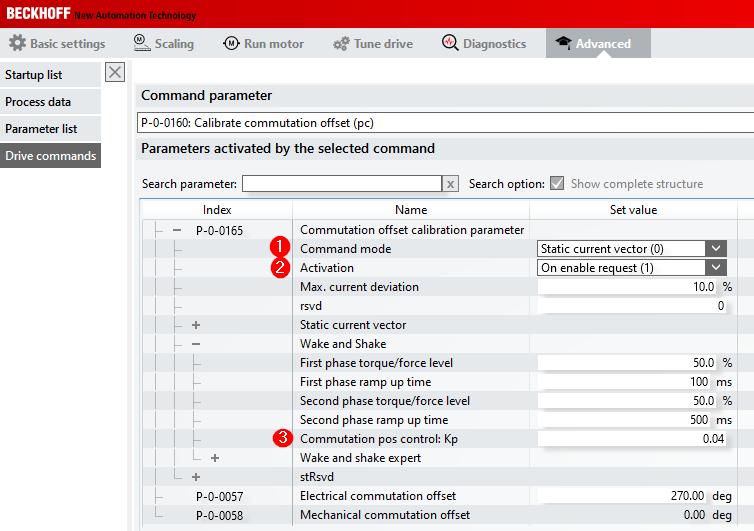
Bei „Command mode“ [1] können Sie zwischen:
- 0: Static current vector und
- 1: Wake and Shake
auswählen.
Das Verfahren “Static current vector” verursacht eine größere Bewegung des Motors. Es kann zum Testen verwendet werden.
Beim Verfahren „Wake and Shake“ wird auf möglichst wenig Bewegung der Achse geachtet. Üblicherweise wird dieses Verfahren ausgewählt.
Beide Verfahren ermitteln einen Kommutierungsoffset, der aber nicht im Parameter P-0-0058 angezeigt wird. Der Wert muss bei jedem Neustart neu ermittelt werden und ist von der Achsposition abhängig.
Er ist daher für den Anwender ohne Bedeutung.
Das Ergebnis kann anschließend mit dem Kommando P-0-0166 überprüft werden. Beide Verfahren sollten zunächst mit den voreingestellten Default-Werten ausgeführt werden.
Die Einstellung „Activation : On enable request (1)“ [2] bewirkt, dass der AX5000 beim ersten Enable nach einem Neustart automatisch die Kommutierungssuche ausführt.
Bei "Wake and Shake" ist es häufig sinnvoll, "Commutation pos control: Kp = 0" einzustellen [3]. Der Motor führt möglicherweise eine etwas größere Bewegung aus. Die Tendenz zum Schwingen während der Ausführung der Routine wird geringer.
Diagnosemöglichkeiten
Für den Fall, dass sich nicht reproduzierbar ein Kommutierungsoffset ermitteln lässt oder der Motor trotz scheinbar korrekt ermitteltem Kommutierungsoffset nicht zuverlässig bewegt werden kann, beschreibt dieses Kapitel Möglichkeiten zur Diagnose mit dem TwinCAT ScopeView.
Die Beschreibung setzt voraus, dass ein leeres Measurement-Projekt vom Typ „YT Scope Project“ existiert und dass Sie wissen, wie neue Achsen und Signale hinzugefügt werden.
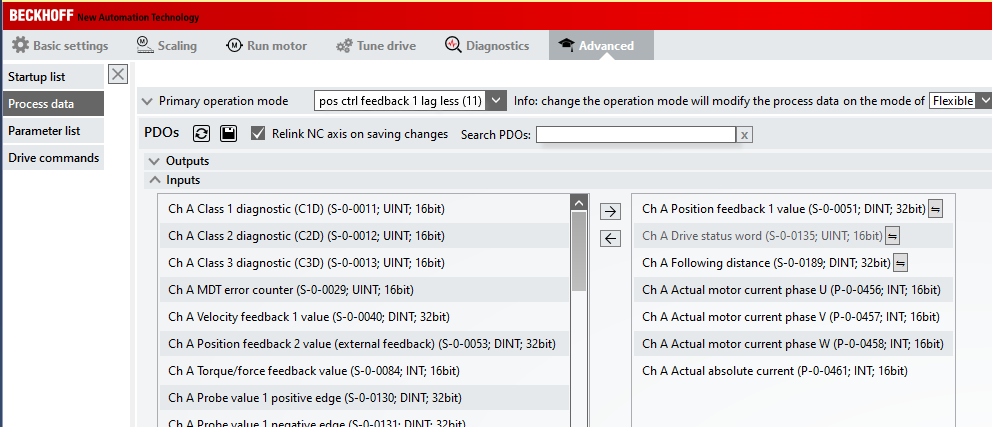
Prozessdaten
Fügen Sie zu den Prozessdaten des AX5000 die folgenden Parameter hinzu:
- P-0-0456, Actual motor current phase U
- P-0-0457, Actual motor current phase V
- P-0-0458, Actual motor current phase W
- P-0-0461, Actual absolute current
ADS-Server aktivieren
Um die Parameter mit dem Target Browser in ScopeView hinzufügen zu können, muss der ADS-Server aktiviert werden:
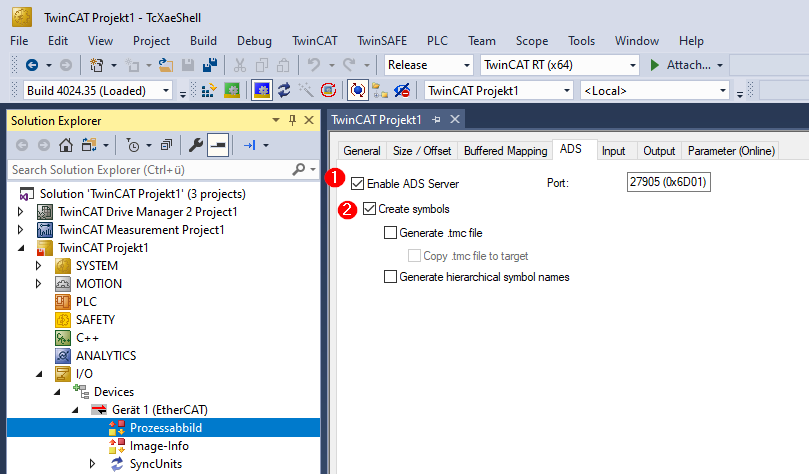
Aktivieren Sie die Checkboxen „Enable ADS Server“ [1] und „Create Symbols“ [2]. Damit diese Änderungen und die hinzugefügten Prozessdaten aktiv werden, müssen Sie die TwinCAT-Konfiguration aktivieren.
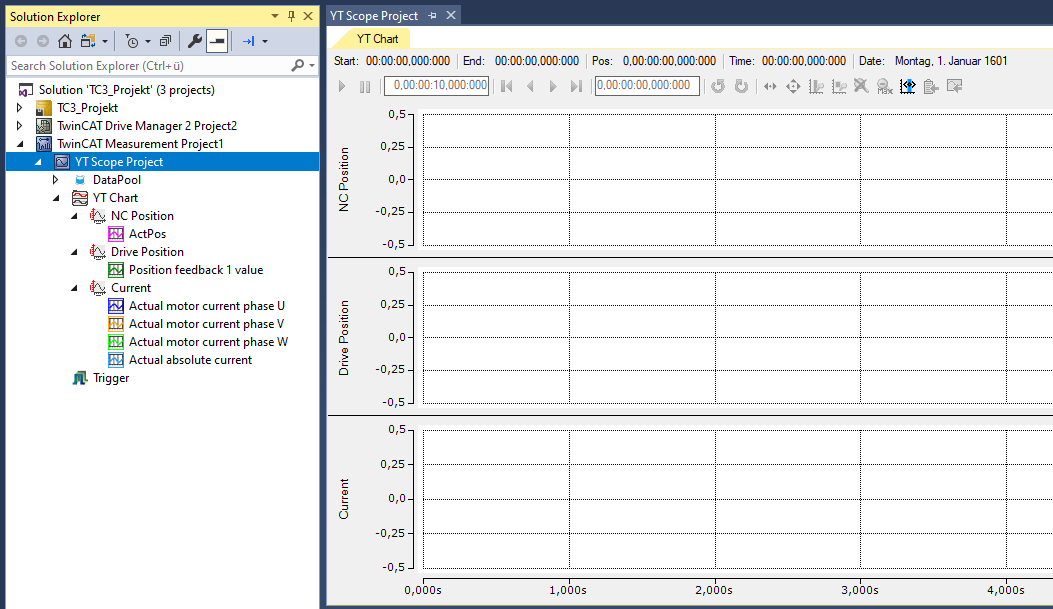
Scope View einrichten
Richten Sie ScopeView wie folgt ein:
Einstellungen für das Kommando P-0-0166
Die mit dem Kommando P-0-0166 ausgeführte Bewegung des Motors kann mit den Werten im Parameter P-0-0167 definiert werden. Ändern Sie „Moving distance“ auf „360 deg“. Die anderen Einstellungen sind für die meisten Fälle passend voreingestellt:
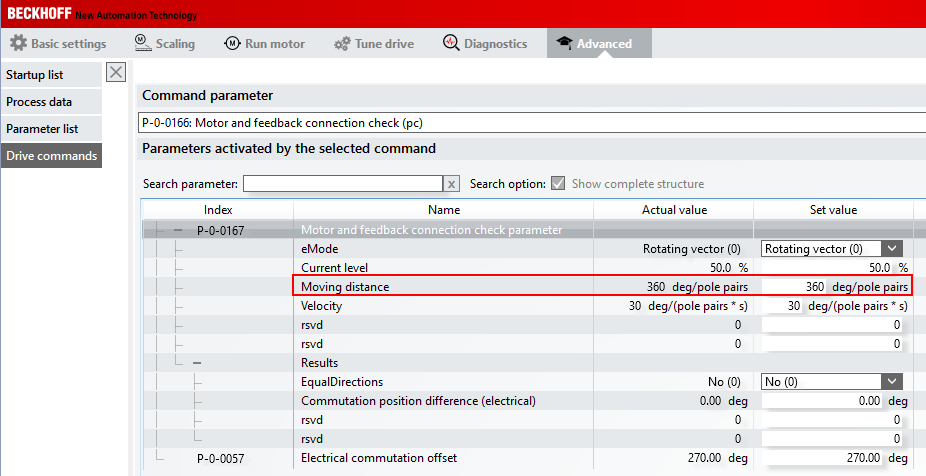
Damit wird der Stromvektor eine elektrische Umdrehung ausführen. Die zu erwartende Rotorbewegung hängt von der Polpaarzahl des Motors ab:
Bewegung = 360° / Motorpolpaarzahl
Anzahl Polpaare | Erwartete Rotorbewegung [deg] |
|---|---|
3 | 120 |
4 | 90 |
5 | 72 |
6 | 60 |
Starten Sie zunächst die Aufzeichnung mit ScopeView. Dann starten Sie die Ausführung des Kommandos P-0-0166. Die folgende Aufzeichnung zeigt das korrekte Verhalten des Motors mit 3 Polpaaren bei „Moving distance = 360 deg“.
Ablauf des Kommandos P-0-0166
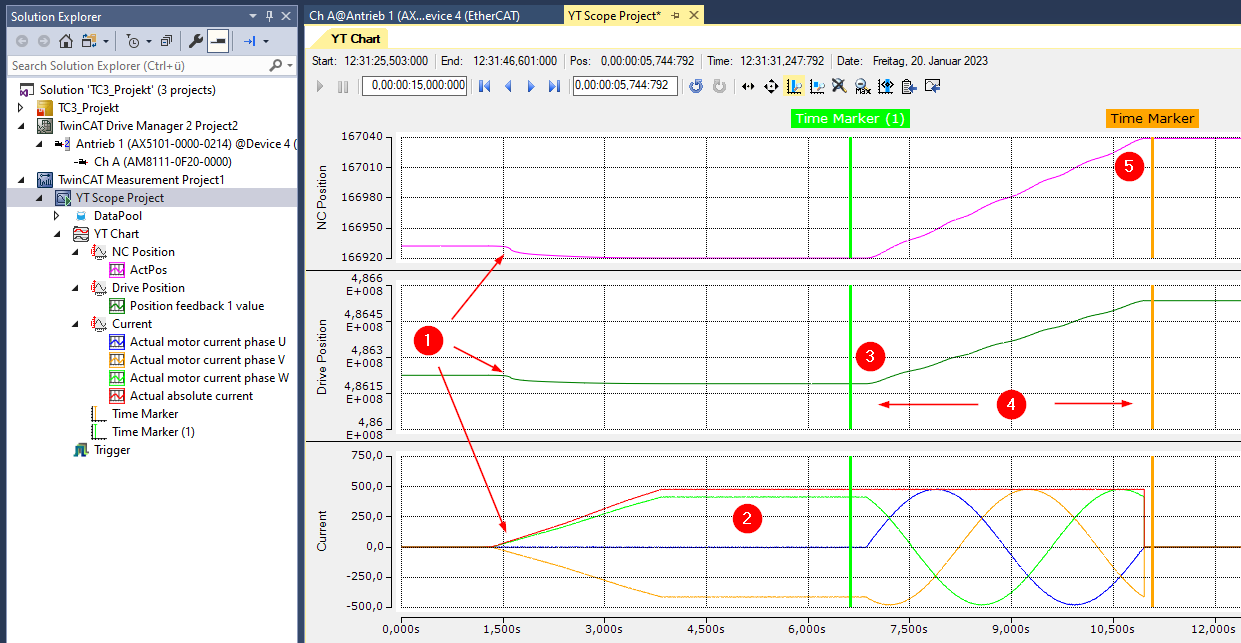
Nach ca. 1,5 s beginnt die Ausführung des Kommandos [1]. Das ist daran zu erkennen, dass der Betrag des Stroms (rote Linie, „Actual absolute current“) ansteigt und die Position sich leicht ändert. Der Rotor richtet sich aus. Die Bewegung ist davon abhängig, wie der Rotor gestanden hat. Der Strom steigt bis zum eingestellten Wert an und bleibt über die eingestellte Zeit konstant [2]. Dann beginnt der Vektor um den vorgegeben elektrischen Winkel zu rotieren [3], im Beispiel 360°. In der Aufzeichnung ist das am Verlauf der Phasenströme und der Veränderung der Position zu sehen [4]. Weil eine Bewegungsdistanz von 360° vorgegeben wurde, durchlaufen die einzelnen Phasenströme jeweils 360°. Kurz vor dem Time Marker [5] ist die Ausführung des Kommandos beendet.
Auswertung
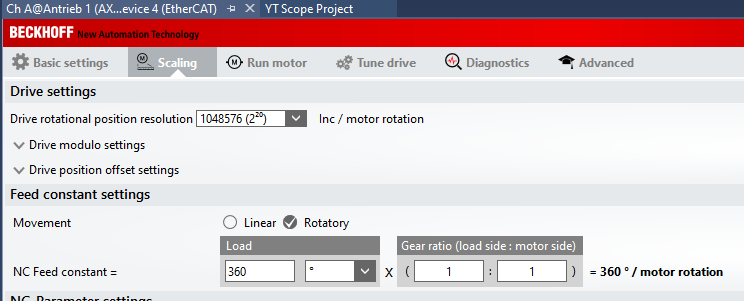
Wie oben beschrieben, wird im Beispiel eine Bewegung des Rotors um 120° erwartet. Der Skalierungsfaktor für die Achse ist auf 360° eingestellt. Deshalb kann die Rotorbewegung in der NC-Position in „°“ abgelesen werden:
Ermitteln Sie die Positionsdifferenz, um die der Rotor während der Ausführung des Kommandos bewegt wurde. Das ist z.B. mit Hilfe der Time Marker und des Marker Windows möglich:
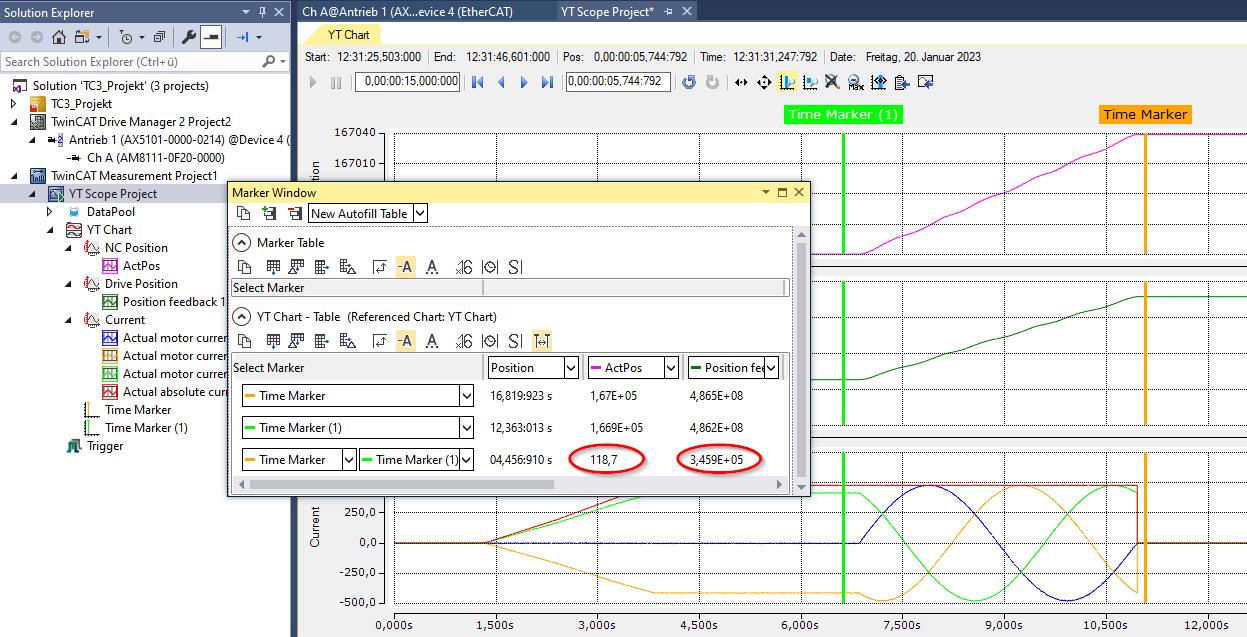
Die Position der NC-Achse hat sich im Beispiel um 118,7° verändert. Das ist nahe genug an den erwarteten 120°.
Der Wert des „Position feedback“ aus den Prozessdaten hat sich um 3,459E+05 geändert.
Aus der Auflösung von 220 = 1048576 Inkr. / Motorumdrehung ergibt sich:

Mögliche Fehlerszenarien
- Der Rotor bewegt sich nicht um die erwartete Differenz.
- Überprüfen Sie Motorpolpaarzahl! Hat sich der Motor doppelt so viel bewegt, wie erwartet? Dann wurde vermutlich die Polpaarzahl mit der Polzahl verwechselt.
- Kann die Motorwelle frei drehen, oder ist die Bewegung mechanisch blockiert/ gebremst?
- Die Phasenströme verlaufen unsymmetrisch.
- Überprüfen sie den elektrischen Anschluss der Motorphasen!
- Die Position wird während der Kommandoausführung im Bereich (4) nicht größer, sondern kleiner.
- Wenn die Drehrichtung für die NC-Achse invertiert wurde, zählen „Position feedback“ (Prozesdaten) und „Actual Position“ (NC) entgegengesetzt.
- Entscheidend ist der Positionswert aus den Prozessdaten. Die Anschlussreihenfolge der Motorphasen stimmt nicht, oder das Feedback zählt in die falsche Richtung. Was zeigt „Equal Directions“ in P-0-0167 / Results“?
- Die Positionswerte aus der Achse und aus den Prozessdaten ergeben unterschiedlich weite Bewegungen.
- Überprüfen Sie die Auflösung des Feedbacks!
- Bei Encodern mit Sincos-Signalen: Stimmt die Anzahl der Sinusperioden pro Umdrehung?
- Bei Resolvern: Stimmt die Anzahl der Resolverpole?
- Überprüfen Sie den Skalierungsfaktor der NC-Achse!
Änderung im Feedback Parameter P-0-0150
Wählen Sie unter „Advanced / Parameter list“ den Parameter P-0-0150, z.B. mit Hilfe der Suchfunktion [1].
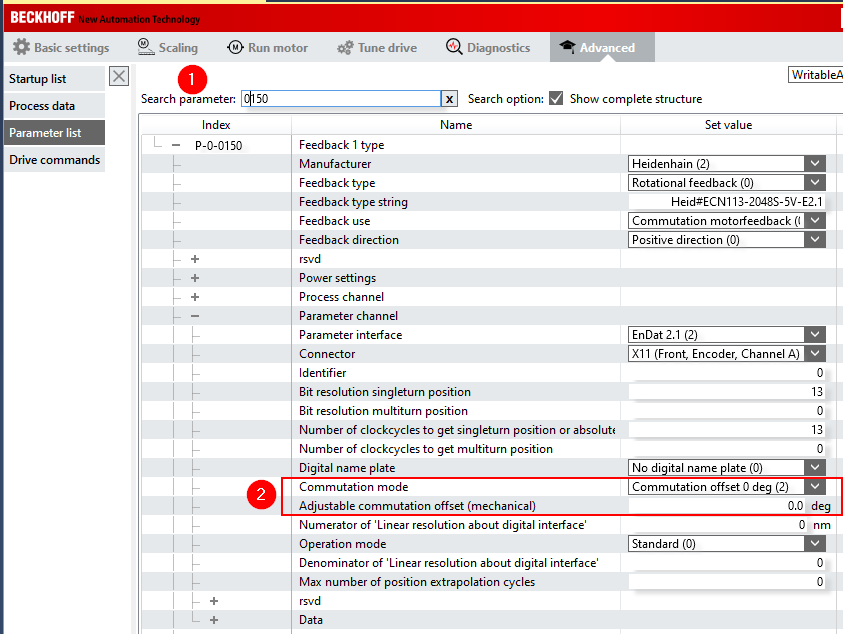
Stellen Sie „Commutation mode“ von „No commutation position (0)“ auf „Commutation offset 0 deg (2)“ [2]. Sollte dort ein anderer Eintrag und bei „Adjustable commutation offset (mechanical)“ ein Wert > 0.0 deg eingetragen sein, empfehlen wir, den Wert 0.0 deg einzutragen und den elektrischen Kommutierungsoffset mit den oben beschriebenen Schritten erneut zu ermitteln. Andernfalls wird eine Mischung aus mechanischem und elektrischem Offset verwendet.
- Anmerkungen:
- Änderungen im Parameter P-0-0150 werden nur durch Aktivieren der Konfiguration wirksam.
- Wenn diese Änderung nicht vorgenommen wird, zeigt der AX5000 beim Versuch, die Achse in Regelung zu schalten („Enable“) die Fehlermeldung „F107, Axis state machine: Current control not ready to enable“.