Auswahl und Eingabe der Daten
Auswahl des Motortyps
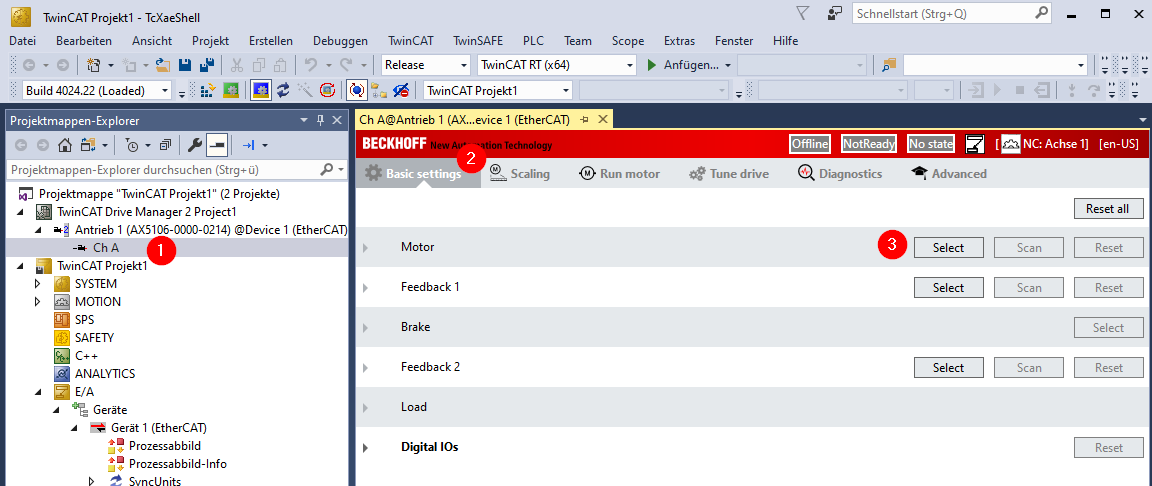
Wählen Sie in Ihrem Drive Manager Projekt den zu parametrierenden Kanal des Servoreglers [1], dann den Reiter „Basic Settings“ [2] und in der Zeile „Motor“ die Schaltfläche „Select“ [3]:
Im sich öffnenden Fenster „Select a Motor“ wählen Sie die Optionen „Third party“ [1], „Manual input“ [2]. Im Folgenden werden die Parameter für einen rotativen [4] Synchronmotor [3] beschrieben. Bitte wählen Sie, ob der Motor eine Haltebremse hat oder nicht [5].
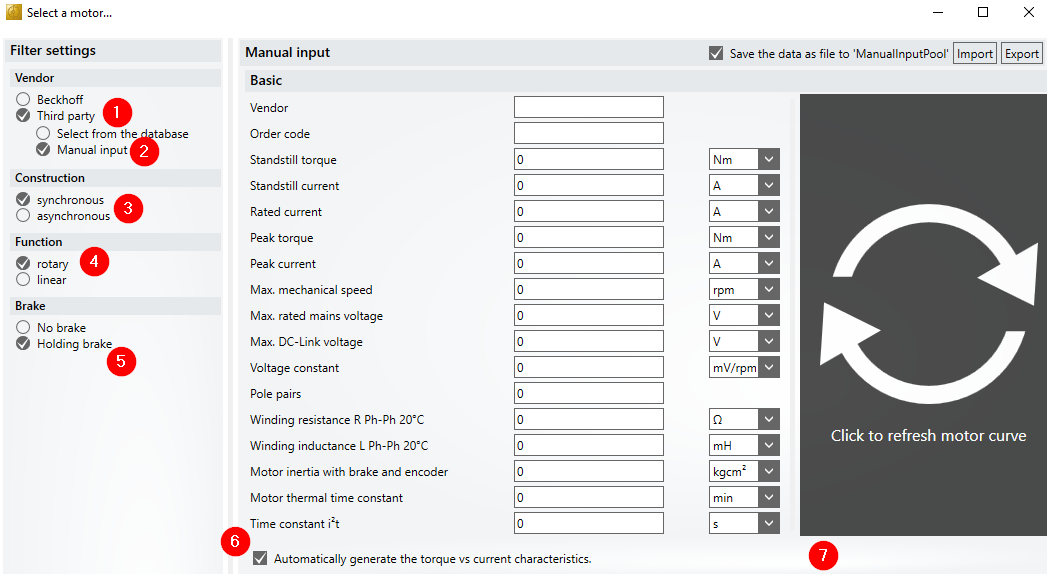
Wenn Sie die Checkbox „Automatically generate the torque vs current characteristics“ [6] aktiv lassen, wird Ihnen nach Eingabe der Motordaten rechts neben der Tabelle eine Kennlinie des Motors angezeigt [7]. Wir empfehlen, die Checkbox aktiv zu lassen. Manche versehentlichen Fehleingaben von Daten lassen sich in der Kennlinie schnell erkennen.
Eingabe der Motorparameter (für einen rotativen Synchronmotor)
- „Vendor“ und „Order code“ sind Bezeichnungen, die auf die Funktion des Motors keinen Einfluss haben. Unter diesen Bezeichnungen wird die Parameterdatei abgelegt und erscheint der Motor bei erneuter Inbetriebnahme.
Die folgenden Parameter entnehmen Sie bitte dem Datenblatt des Motors. Die Einheiten hinter den Eingabefeldern sind in Datenblättern üblich, können aber umgeschaltet werden, falls andere Einheiten vorliegen.
 | Stromwerte sind als Effektivwerte (rms, nicht Scheitelwert) einzugeben. |
- “Standstill torque” (Stillstandsdrehmoment)
- Wenn für „Standstill current“ (Stillstandsstrom) und „Rated current“ (Nennstrom) keine separaten Werte angeben sind, tragen Sie für beide den gleichen Wert ein.
- „Peak torque“ (maximales Drehmoment) und „Peak current” (maximaler Strom) sind für die Erstellung der Kennlinie und damit für die korrekte Behandlung des Motors wichtig. „Peak torque“ kann notfalls mit Hilfe des maximalen Stroms und der Drehmomentkonstanten geschätzt werden. „Peak current“ ist wichtig, um den Motor nicht zu überlasten.
- Wenn es im Datenblatt des Motors keine Angabe zu „Max. mechanical speed“ gibt, geben Sie eine Drehzahl ein, die größer ist als die in der Anwendung erforderliche.
- „Max. rated mains voltage“ ist die zulässige maximale AC-Versorgungsspannung. Übliche Werte sind 230 V, 400 V oder 480 V.
- „Max. DC-Link voltage“ ist ein DC-Spannungswert, der kurzzeitig auftreten kann, nicht dauerhaft. Bei Überschreiten dieses Wertes meldet der AX5000 einen Überspannungsfehler.
 | Bei der Versorgung mit 400 VAC beträgt die Zwischenkreisspannung 560 VDC. Bei Bremsvorgängen speist der Motor Energie zurück und die Zwischenkreisspannung steigt an, bis ggf. der Bremswiderstand eingeschaltet wird. Der Wert für die max. zulässige DC-Spannung muss oberhalb der Einschaltschwelle für den Bremswiderstand liegen und darf deshalb nicht zu klein sein. Der Default-Wert beträgt 890 VDC. Bei diesem Wert schaltet der AX5000 mit einer Fehlermeldung ab. Für die meisten Motoren, die für den Betrieb an 400 VAC ausgelegt sind, ist das kein Problem. Wenn der Motor dafür nicht zugelassen ist, geben Sie einen niedrigeren Wert ein, z.B. 750 VDC. Bei zu niedrig gewählten Werten gibt der AX5000 einen Parameterfehler (F4A5) aus. |
- „Voltage constant“, die Spannungskonstante des Motors, wird ebenfalls für die Erstellung der Kennlinie und damit die korrekte Behandlung des Motors benötigt.
- Wählen Sie die korrekten Einheiten. Wenn Vs/rad angegeben sind, wählen sie Vs!
- Achten Sie bei der Eingabe der „Pole pairs“ darauf, nicht die Anzahl der Pole einzugeben, sondern die der Polpaare.
- Bei Wicklungswiderstand, „Winding resistance R Ph-Ph 20°C“, und Wicklungsinduktivität, „Winding inductance L Ph-Ph 20°C“, sind die von Phase zu Phase gemessenen Werte gefragt. Wenn im Datenblatt des Motors Werte für eine einzelne Wicklung angegeben sind, verdoppeln Sie diese! Mit Hilfe dieser Werte erfolgt die Einstellung der Regelparameter für den Stromregler.
- „Motor inertia with brake and encoder“ (Rotorträgheitsmoment inkl. Encoder und Bremse): Dieser Wert geht in die Berechnung für die Regelparameter des Drehzahlreglers ein.
- „Motor thermal time constant“ (thermische Zeitkonstante des Motors): Mit diesem Wert rechnet die Software das thermische Modell des Motors zum Schutz vor thermischer Überlastung.
- „Time constant i2t“. Wenn ein Wert vorhanden ist, geht er ebenfalls in die Berechnung des thermischen Motormodells ein. Weil er in den meisten Motordatenblättern nicht angegeben ist, kann in der Tabelle der Wert „0“ bleiben. Das thermische Modell rechnet dann nur mit der „Motor thermal time constant“.
Eingabe von Nennpunkten (Nominal Points)
Unter „Nominal Points“ können Sie einen oder mehrere Nennpunkte des Motors bei verschiedenen Spannungen eingeben, um die Kennlinie genauer zu beschreiben:
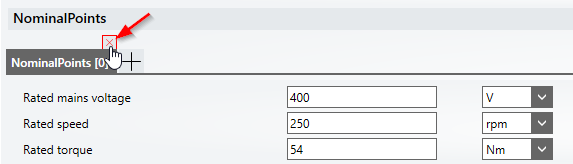
Wenn Sie keinen Nennpunkt eingeben können, schließen Sie das Fenster mit dem zugehörigen Kreuz, das beim Überfahren mit dem Mauscursor sichtbar wird (siehe obiges Bild). Solange das Fenster offen und nicht ausgefüllt ist, wird keine Kennlinie angezeigt.
Eingabe des Temperatursensors
Wenn der Motor einen Sensor zur Überwachung der Wicklungstemperatur hat, aktivieren Sie die Checkbox „Motor temperature sensor or switch“:
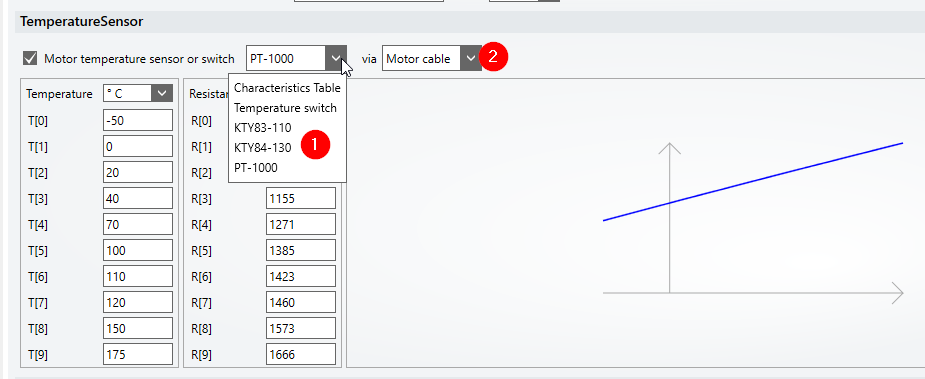
Wählen Sie aus der Auswahlliste den richtigen Sensor [1] und seinen Anschluss [2] aus.
Bitte beachten Sie die folgenden Punkte:
- Die meisten Sensoren können nur an X14 / X24 an der Unterseite des AX5000 angeschlossen werden. Die richtige Auswahl dafür ist „Motor cable“.
- Am Feedback-Stecker (X12 / X22) ist nur die Auswertung eines Temperatur-Schalters möglich. Die Abschaltung mit Motorübertemperatur erfolgt bei ca. 1,3 kOhm.
- Die Software erzeugt abhängig von der Auswahl eine Kennlinie, zeigt sie an und trägt Wertepaare in die Tabelle ein. (Die Werte werden im Parameter P-0-0076 eingetragen.)
Eingabe der Bremsendaten
Wenn Sie am Anfang gewählt haben, dass der Motor eine Haltebremse hat, müssen Sie deren Daten im zugehörigen Fenster eingeben:
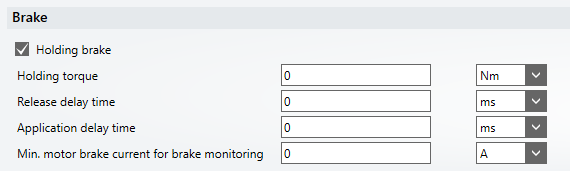
Das Haltemoment der Bremse (Holding torque) steht normalerweise im Datenblatt des Motors, ebenso wie die Zeiten zum Öffnen (Release delay time) und Schließen (Application delay time).
Abhängig von dem Wert für „Min. motor brake current for brake monitoring“ wird die Überwachung der Bremse voreingestellt: Bei gelöster Bremse muss mindestens der eingestellte Strom durch die Bremse fließen; andernfalls löst der AX5000 einen Bremsenfehler aus.
Tragen Sie hier keinen zu großen Stromwert ein! Die Strommessung ist nicht präzise und zu große Werte lösen unnötige Fehler aus. Bewährt hat sich der halbe Wert des Bremsennennstroms.
| Wenn bei den „Filter settings“ die Option „Holding brake“ aktiviert ist, wird so lange keine Motorkennlinie angezeigt, bis die Daten der Bremse eingetragen sind. |
Speichern der Motordaten
Nach Eingabe aller Motor- und Bremsendaten achten Sie darauf, dass eine sinnvolle Kennlinie angezeigt wird und schließen Sie das Eingabefenster mit „OK“.
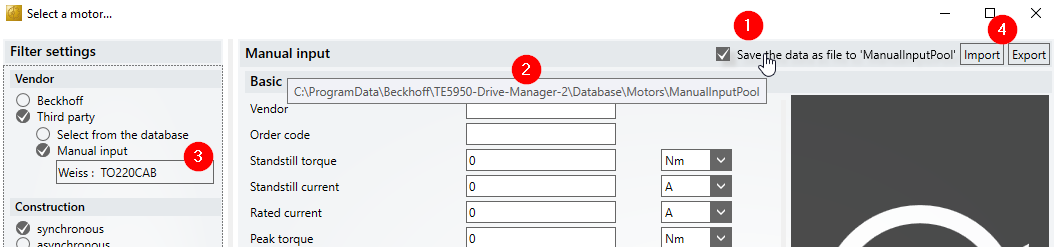
Wenn die Checkbox „Save the data as file to ManualInputPool“ aktiv ist [1], werden die Motordaten beim Schließen der Eingabemaske mit „Ok“ automatisch in einer Datei gespeichert. Der Pfad zu dem Verzeichnis wird angezeigt, wenn der Maus-Cursor über dem Text steht [2]:
C:\ProgramData\Beckhoff\TE5950-Drive-Manager-2\Database\Motors\ManualInputPool
Bereits früher dort gespeicherte Motordateien werden bei der Auswahl „Manual input“ angezeigt und können direkt ausgewählt werden [3].
Außerdem ist es möglich, Dateien an einen beliebigen Speicherort zu exportieren und wieder zu importieren [4]. Die Dateien erhalten wahlweise die Endung „dmmotor“ oder „xeds“.
| Wenn Sie die Motordaten im Format „xeds“ speichern, kann die Datei auch in anderen Projekten eingesetzt werden, in denen nicht der TwinCAT 3 Drive Manager 2 sondern der „klassische“ TC Drive Manager genutzt wird. Dies geschieht z.B. um ein Gerät zu konfigurieren, das eine Firmwareversion <2.10 hat. Damit ersetzt diese Funktion des TwinCAT 3 Drive Manager 2 das frühere Tool „ TC Motor Data File Generator“. |
Auswahl des Feedbacks
Grenzen Sie die Auswahl mit Hilfe der „Filter settings“ ein. Wählen Sie das Feedback aus der Liste aus.
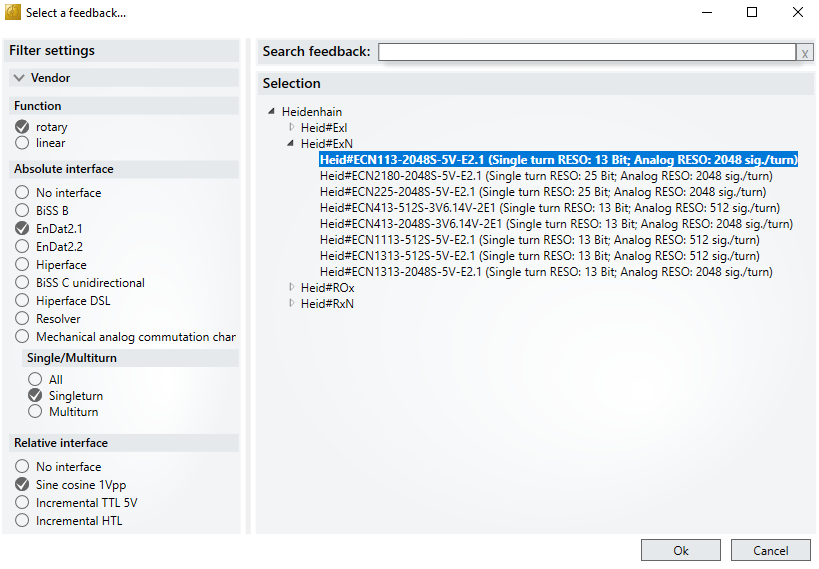
| Am Stecker X11 / X21 des AX5000 können nur Encoder betrieben werden, die eine absolute (digitale) und eine inkrementelle Schnittstelle haben. Für Encoder mit rein digitaler Schnittstelle (BISS-C, EnDat 2.2) benötigen Sie die Encoder-Optionskarte AX572x. |