Parametrieren des Filters
| |
Vorsicht, Verletzungsgefahr durch unkontrollierte Bewegungen! Bei unzulässigen Dämpfungswerten kommt es zu einer starken Phasenverschiebung, hierdurch kann es zu unkontrollierten Beschleunigungen des Motors und weiteren instabilen Zuständen kommen. |

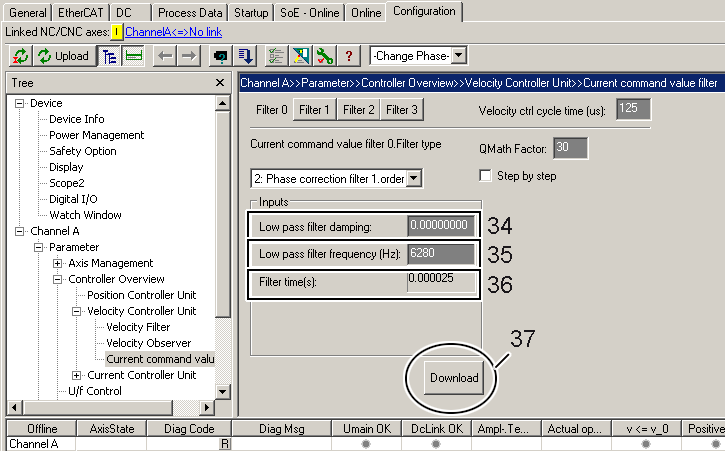
Dieser Filter wird mit den Parametern "Grenzfrequenz" (35) und "Dämpfung" (34) parametriert. Die Zeitkonstante (36) errechnet sich aus der Grenzfrequenz nach der Formel --> "Zeitkonstante [s] = 1/ (2*Pi*Grenzfrequenz [Hz] )".
Bestimmung der Grenzfrequenz
Folgender Test gibt Aufschluss über eventuell vorhandene Störfrequenzen: Durchfahren Sie den notwendigen Betriebsdrehzahlbereich und fertigen Sie eine Scope-Aufzeichnung des Istwirkstroms (IDN S-0-0084) an. Eine Frequenzanalyse zeigt eventuell vorhandene Resonanzstellen.
Tippen Sie den Button "Download" (37), um die Parametrierung abzuschließen. Wenn Sie "online" sind, werden diese Parameter direkt in den AX5000 geladen und aktiviert. Wenn Sie "offline" sind, werden diese Parameter nur in die Startupliste geschrieben.
Die Limitierung der Dämpfung der Amplitude sorgt dafür, dass die Phasenverschiebung wieder zurück auf null geht. Für die meisten Antriebsapplikationenist die limitierte Dämpfung ausreichend.
Beispiel:
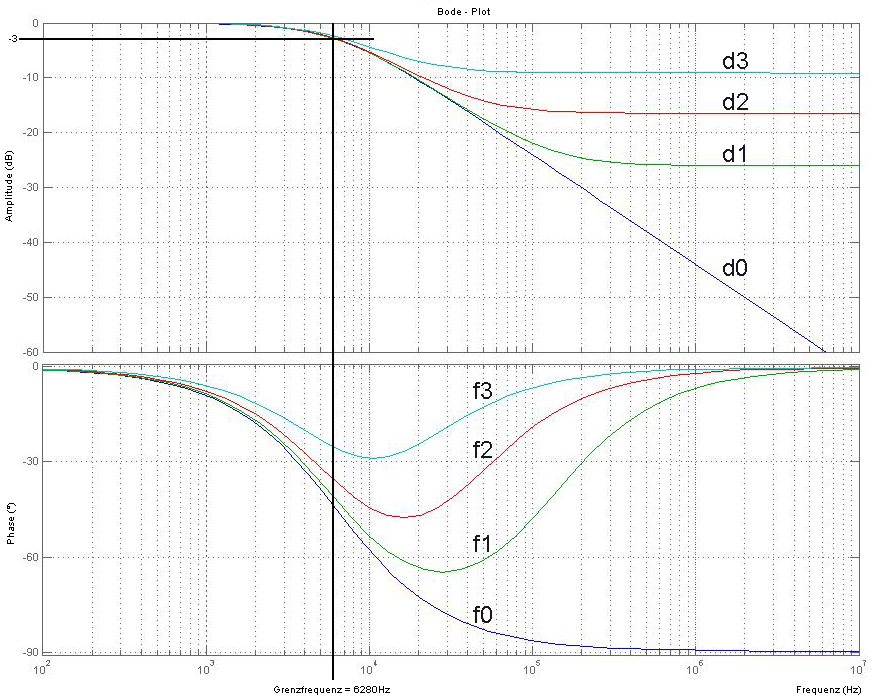
Bei diesem Beispiel wurde zur Verdeutlichung der Frequenzgang des PT1-Filters dargestellt. Der Bodeplot (logarythmische Frequenskennlinie) Plot zeigt im oberen Bereich die Amplitude über die Frequenz und im unteren Bereich die zugehörige Phasenverschiebung über die Frequenz. Zusammen betrachtet erkennt man, dass mit der Dämpfung der Amplitude eine Phasenverschiebung entsteht.
Parametereingaben im TCDriveManager:
Zeitkonstante = 0,000025 s
(Grenzfrquenz = 6280 Hz)
Dämpfung:
d0 = 0
d1 = 0,05
d3 = 0,15
d4 = 0,35
"Phasenkorrekturfilter 1. Ordnung"- Methode - "Step by step"
 | Expertentipp! Die Software berechnet anhand der eingegebenen Parameter die Koeffizienten selbstständig. Wenn Sie über genügend Erfahrung in der Regelungstechnik verfügen, können Sie die Koeffizienten auch selbst bestimmen und so das Verhalten des Filters beeinflussen. |
Die Vorgehensweise entspricht der Vorgehensweise wie beim "Notch-Filter Classic - Methode" - "Step by step".