Konfiguration des zweiten Encoders
Bitte sehen Sie im AX5000 Systemhandbuch nach, wie der Encoder anzuschließen ist.
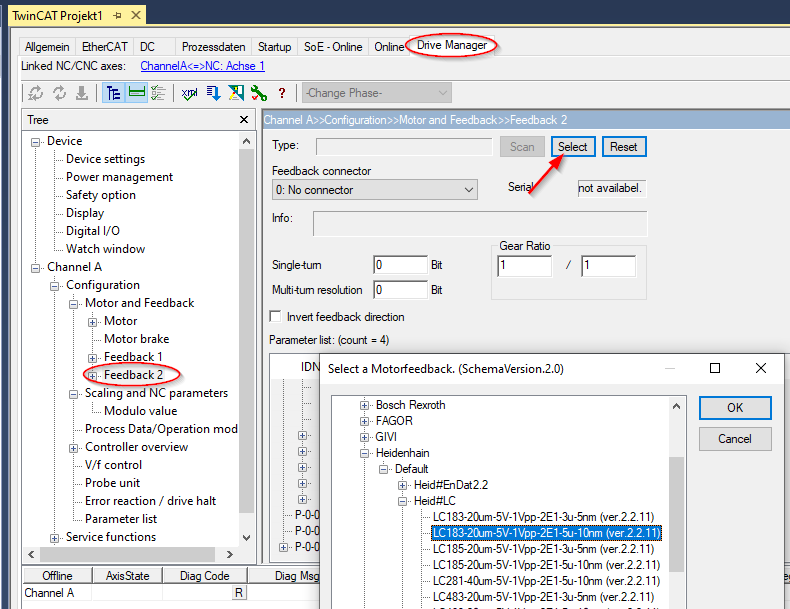
Im Tc Drive Manager wählen Sie die Seite „Feedback 2“ und „Select a Motorfeedback“ um den Encoder aus der Liste der unterstützten Feedbacks auszuwählen. Im folgenden Beispiel wird ein Linear-Encoder der Fa. Heidenhain mit EnDat-Schnittstelle und Sinus-Kosinus-Signalen gewählt:
Bestätigen Sie die nächste Meldung mit „OK“. Die erwähnten Einstellungen werden unten beschrieben.
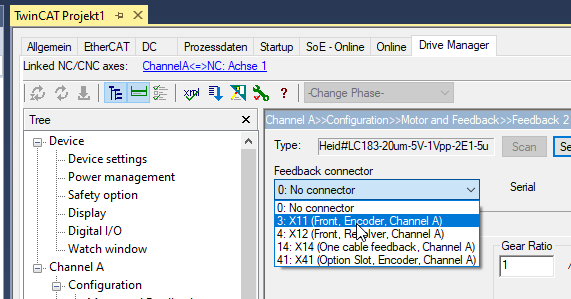
Falls der richtige Anschlussstecker nicht automatisch eingestellt wird, wählen Sie ihn aus der Liste:
Öffnen Sie den Parameter P-0-0180, um zum Eintrag Process channel/Data/Sin / Cos/ zu kommen:
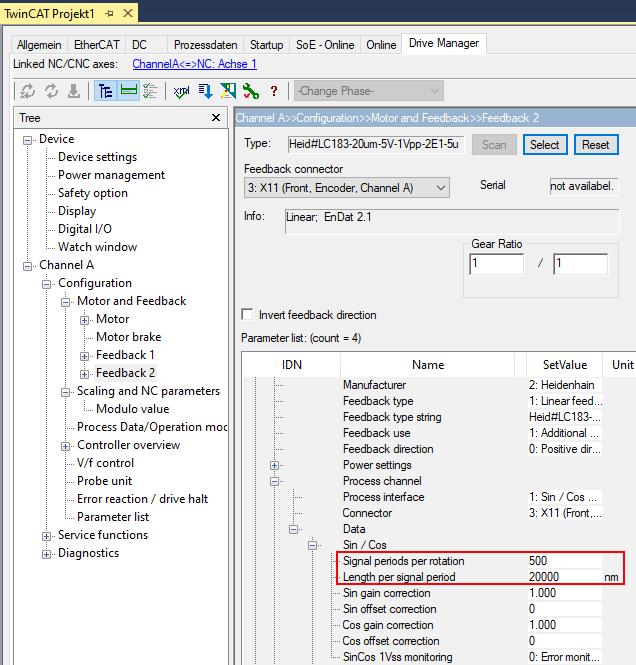
“Length per signal period” wird automatisch aus der Datenbank eingestellt.
Sie müssen “Signal periods per rotation” so wählen, dass das Produkt der beiden die Wegstrecke der Last bei einer Motorumdrehung ergibt.
Beispiel: Der Motor treibt eine Kugelumlaufspindel mit 10mm Spindelsteigung.
=> Die Last bewegt sich 10mm pro Motordrehung.
Length per signal period = 20000nm wird automatisch aus der Datenbank eingestellt.
Signal periods per rotation = 10mm / 20000nm = 500
Anmerkung: Beide Parameter müssen sowohl bei einem rotatorischen als auch bei einem linearen Feedback korrekte Werte haben.
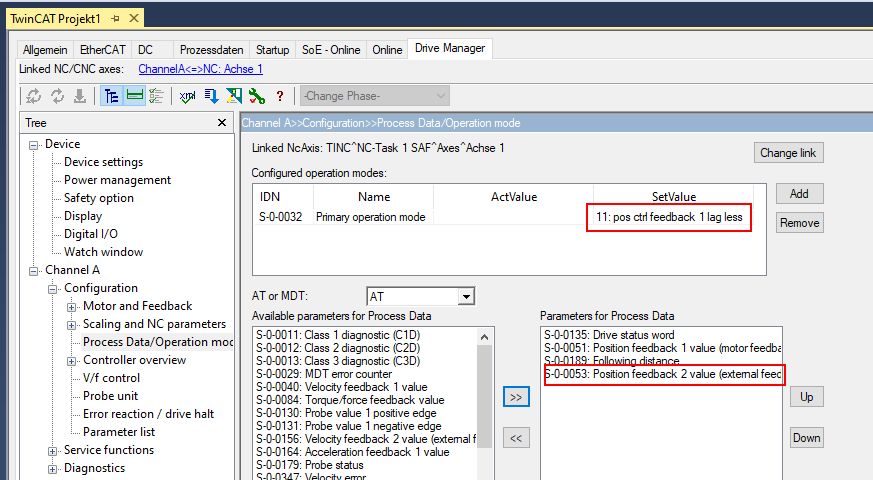
Fügen Sie den Parameter P-0-0053 zum Prozessabbild hinzu und stellen Sie sicher, dass die Betriebsart weiterhin „11_ pos ctrl. feedback 1, lag less“ bleibt.
Führen Sie “Activate configuration” aus, damit die Änderungen wirksam werden.