EtherCAT als Antriebsbus
Bei der Entwicklung von EtherCAT stand von Anfang an die kombinierte Einsatzfähigkeit für Antriebstechnik und schnelle I/O-Signale im Vordergrund. Kurze Zykluszeiten und hohe Synchronität, wie sie für über den Bus geschlossene Regelkreise benötigt werden, lassen sich in bisherigen Systemen nur mit speziellen "Antriebsbussen", wie z.B. CANopen, realisieren.
Spezielle Anforderungen aus der Antriebstechnik
- Zykluszeit
- Synchronität
- Gleichzeitigkeit
Typische Werte für benötigte Zykluszeiten liegen zwischen 1 und 4 ms bei zyklischer Lagevorgabe mit Lageregelung im Antrieb. Als ausreichende Anforderung an die Synchronität wird in der Antriebstechnik häufig eine Mikrosekunde angegeben Während die Synchronität den zeitlichen Jitter der Abarbeitung der Funktionen in den beteiligten Teilnehmern (Antriebe und Steuerung) angibt, definiert die Gleichzeitigkeit das Maß des zeitlichen Versatzes dieser Funktionen. Die Synchronität ist für den einzelnen Teilnehmer wichtig, damit eigene, unterlagerte Regel- kreise sich auf das zyklische Signal entsprechend genau synchronisieren können. Die Gleichzeitigkeit erlaubt zudem, verteilte Teilnehmer an einer gemeinsamen Aufgabe, mit der absolut selben Zeitbasis, arbeiten zu lassen.
Verteilte Uhren - Eigenschaften des EtherCAT-Slave-Controllers
EtherCAT nutzt zur Synchronisationsregelung einen Ansatz, der auf so genannten "verteilten Uhren" basiert: Alle Teilnehmer besitzen eine eigenständige Uhr, auf Basis derer die lokalen Zyklen und Ereignisse ablaufen. Entscheidend dabei ist, dass alle Uhren gleich schnell laufen und die gleiche Basiszeit besitzen. Eine im EtherCAT-Slave-Controller (ESC) integrierte Regelung stellt sicher, dass alle Uhren sich an einer Referenz-Uhr orientieren und unabhängig von Temperatur und Herstell-Toleranzen synchron laufen.
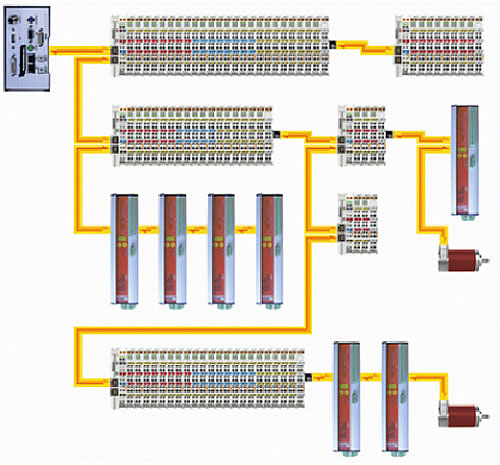
Topologie
Linie, Baum oder Stern: EtherCAT unterstützt nahezu beliebige Topologien (siehe Bild). Die von den Feldbussen her bekannte Bus- oder Linienstruktur wird damit auch für Ethernet verfügbar. Besonders praktisch für die Anlagenverdrahtung ist die Kombination aus Linie und Abzweigen bzw. Stichleitungen: die benötigten Schnittstellen sind auf den Kopplern vorhanden, zusätzliche Switches werden nicht benötigt. Natürlich kann aber auch die klassische Switch-basierte Ethernet Sterntopologie eingesetzt werden.
Die maximale Flexibilität bei der Verdrahtung wird durch die Auswahl verschiedener Leitungen vervollständigt. Flexible und sehr preiswerte Standard Ethernet Patch-Kabel übertragen die Signale wahlweise auf Ethernet-Art (100Base-TX) oder in der E-Bus-Signaldarstellung. Kunststoff-Lichtwellenleiter (POF) werden das System für spezielle Anwendungsfälle ergänzen. Die gesamte Bandbreite der Ethernet Vernetzung - wie verschiedenste Lichtleiter und Kupferkabel - kann in der Kombination mit Switches oder Medienumsetzern zum Einsatz kommen. Die Fast Ethernet Physik erlaubt eine Leitungslänge von 100 m zwischen zwei Teilnehmern, die E-Bus Leitung ist für Abstände bis 10m vorgesehen. Für jede Leitungsstrecke kann die Signalvariante individuell ausgewählt werden. Da bis zu 65535 Teilnehmer angeschlossen werden können, ist die gesamte Netzausdehnung nahezu unbeschränkt.